Funded by Faculty of Engineering, Mahidol University – 200,000 THB (5,900 USD)
Collaboration with Thai Robotics Society
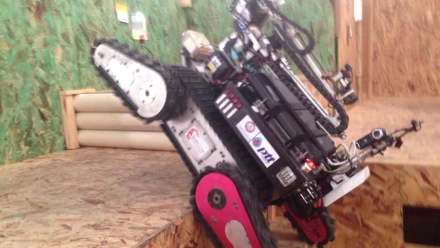
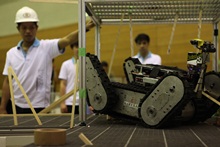
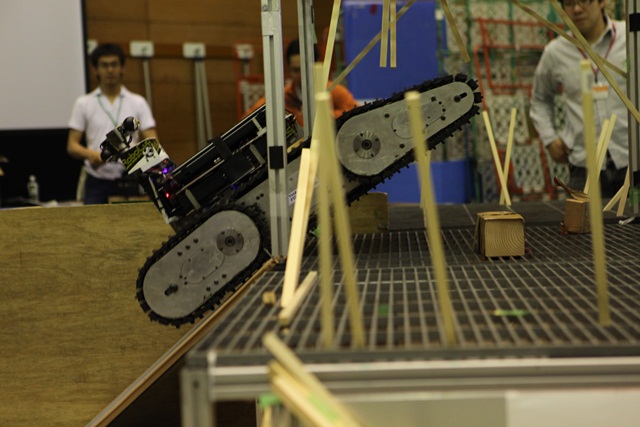
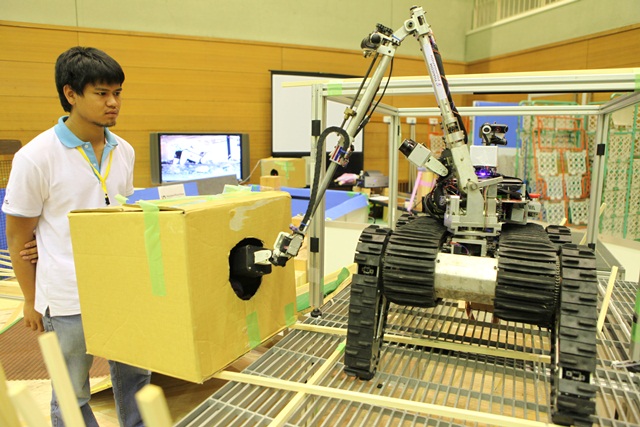
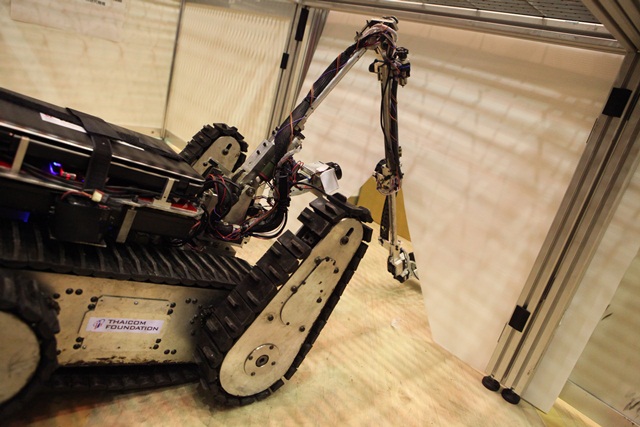
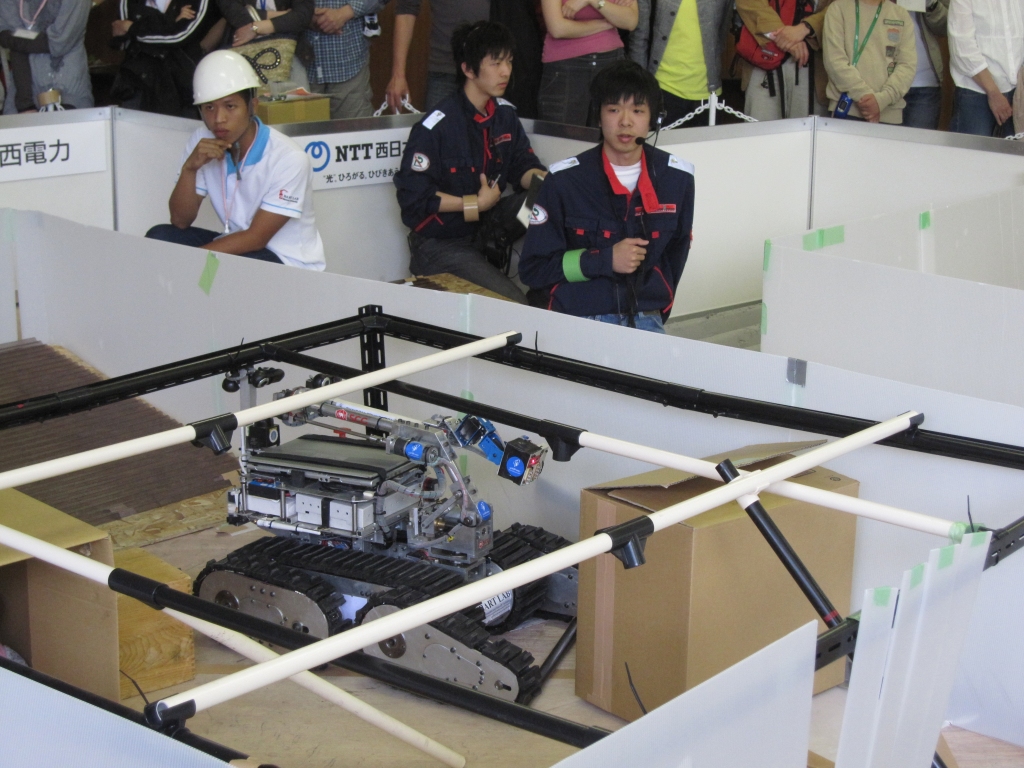
Research on design and development of rescue robots recently become more popular. This is to serve the needs of such robots to help rescue team during their works in recovery a disaster. The recent disasters are, such as, South Indian Ocean Tsunami, South Chinese Earthquake, and more. The project is aiming to develop a series of tele-operated and autonomous rough terrain rescue robots. The robot is equipped with life-signal sensors (i.e. heat sensors, motion sensors, real-time video camera, CO-2 sensor, and sound detector.) The tele-operated robots require a remote-operated driver to control the robot through a wireless communication system. The robot driver is able to navigate the robots by observing the stream real-time video images to the control station. The autonomous robot is self-navigating itself by using a SLAM algorithm to generate map and motion path automatically to the robot. All tele-operated robots and autonomous robot are working together to perform search and rescue tasks.





References
- Model Predictive Control-Based Thermoelectric Cooling for Rough Terrain Rescue Robots
- Challenges for Novice Developers in Rough Terrain Rescue Robots: A Survey on Motion Control Systems
- Advancing the State of Urban Search and Rescue Robotics Through the RoboCupRescue Robot League Competition
- Energy Optimized Path Planning and Decision Making for Multiple Robots in Rescue Operations
- Stereo Vision-based Object Detection and Depth Estimation from 3D Reconstructed Scene for an Autonomous Multi Robotic Rescue Mission
- Live Displacement Estimation for Rough Terrain Mobile Robot: BART LAB Rescue Robot
- Battery Management for Rescue Robot Operation
- A Study on Risk Assessment for Improving Reliability of Rescue Robots
- Enforced Acceleration Control for DC Actuated Rescue Robot
- Effective Vital Sign Sensing Algorithm and System for Autonomous Survivor Detection in Rough-Terrain Autonomous Rescue Robots
- The RoboCupRescue Robot League: Guiding Robot Towards Fieldable Capabilities
- On the Design and Development of A Rough Terrain Robot for Rescue Missions
- Fusion Sensory Schemes for Real-Time Survival Searching on Extreme-Terrain Rescue Robot: A further Study from A Real Experience