BART LAB’s robotics team advanced to the RoboCup 2025 Quarter Finals in France, winning their final match 7–1 after intense battles against top German and Chinese teams — a strong finish and invaluable experience for the Mahidol team.
Dr. Jackrit Suthakorn visited Tsinghua University, exploring its world-class facilities and historic campus, alongside international academic leaders from RoboCup Asia-Pacific, Portugal, and the UAE.
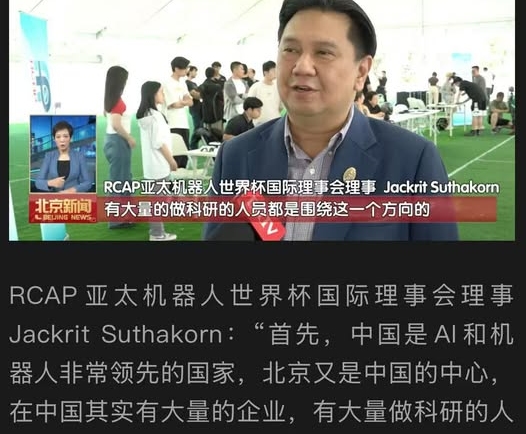
Dr. Jackrit Suthakorn appeared on Beijing TV as an RCAP Trustee, expressing support for Beijing’s readiness to host the World Humanoid Robot Master and encouraging Thailand’s participation.
Beijing, China – July 5, 2025 Assoc. Prof. Dr. Jackrit Suthakorn was invited to participate as a Trustee in the RCAP Beijing Humanoid Robot Workshop, an event aimed at preparing for the upcoming World Humanoid Robot Olympic. The workshop was hosted by…
BART LAB showcased its autonomous stair-climbing smart wheelchair at the Thailand Research Expo 2025, representing Mahidol University in the Research University Network (RUN).
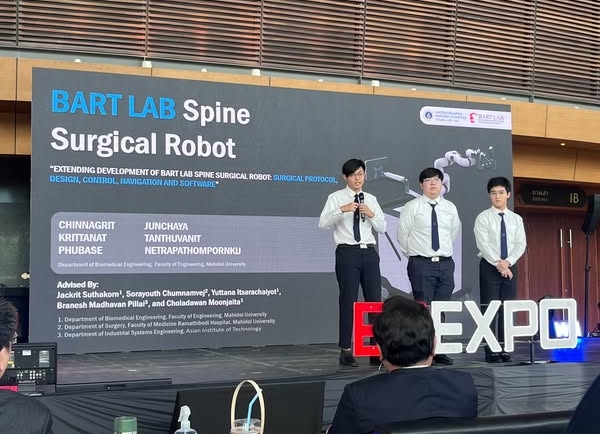
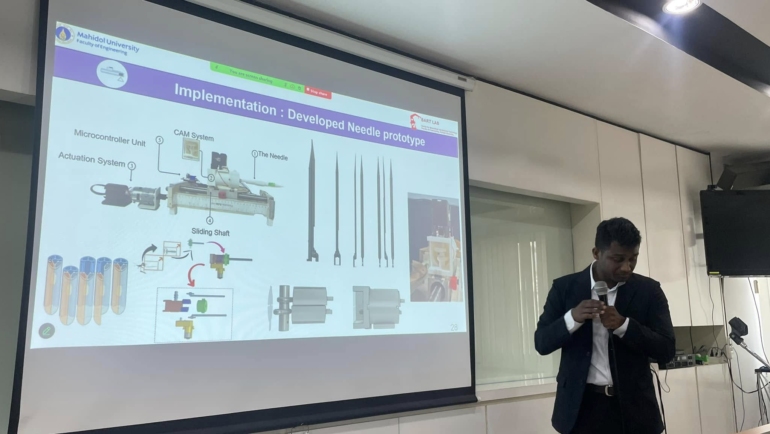
BART LAB’s Spine Surgical Robot team—Mono, Oat, and Mind—won the Gold Award at Mahidol Engineering Maker Expo 2025, marking the lab’s second consecutive victory with innovations in surgical planning, real-time tracking, and interface design.
Dr. Dileep Sivaraman, BART LAB member, has completed his Ph.D. in Biomedical Engineering, co-advised by Dr. Songpol Ongwattanakul and Assoc. Prof. Jackrit Suthakorn. Congratulations to our newest Ph.D.!
BART LAB joined FTI EXPO 2025 as the only university-affiliated exhibitor, showcasing medical robotics innovations among Thailand’s top industrial players.
BART LAB, led by Assoc. Prof. Dr. Jackrit Suthakorn, visited the Vice Governor of Tottori Prefecture, Japan, to explore medical innovation collaboration. The meeting was hosted by Mr. Okamura, President of the Tottori Industry Promotion Organization.
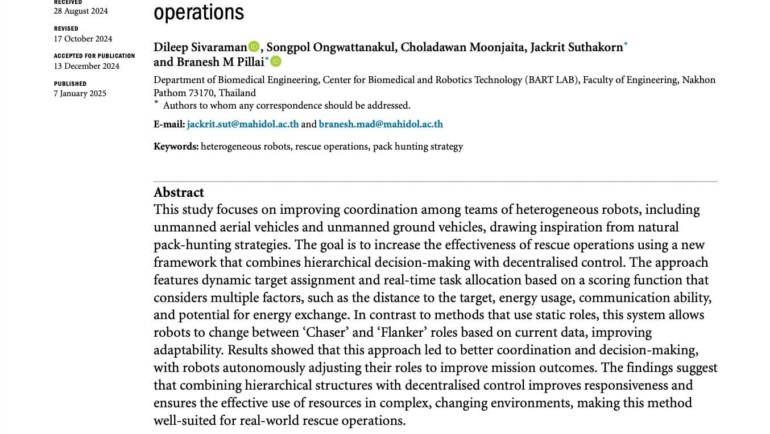
BART LAB published a Q1 paper in Bioinspiration & Biomimetics on pack hunting strategies for heterogeneous rescue robots, demonstrating a novel bio-inspired coordination model.