2022
Borvorntanajanya, Korn; Suthakorn, Jackrit
The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System Journal Article
In: IEEE Access, vol. 10, pp. 99762–99775, 2022, ISSN: 2169-3536.
Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science, General Engineering, General Materials Science
@article{Borvorntanajanya2022,
title = {The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System},
author = {Korn Borvorntanajanya and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/2J.pdf},
doi = {10.1109/access.2022.3207179},
issn = {2169-3536},
year = {2022},
date = {2022-00-00},
urldate = {2022-00-00},
journal = {IEEE Access},
volume = {10},
pages = {99762--99775},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {Electrical and Electronic Engineering, General Computer Science, General Engineering, General Materials Science},
pubstate = {published},
tppubtype = {article}
}

2021
Kishore, Mayur; Sharma, Bibhu; Pillai, Branesh M.; Suthakorn, Jackrit
Model Predictive Control-Based Thermoelectric Cooling for Rough Terrain Rescue Robots Journal Article
In: IEEE Access, vol. 9, pp. 167652–167662, 2021, ISSN: 2169-3536.
Links | BibTeX | Tags: General Computer Science, General Engineering, General Materials Science
@article{Kishore2021,
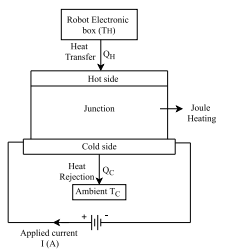
title = {Model Predictive Control-Based Thermoelectric Cooling for Rough Terrain Rescue Robots},
author = {Mayur Kishore and Bibhu Sharma and Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/4J.pdf},
doi = {10.1109/access.2021.3136174},
issn = {2169-3536},
year = {2021},
date = {2021-00-00},
urldate = {2021-00-00},
journal = {IEEE Access},
volume = {9},
pages = {167652--167662},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {General Computer Science, General Engineering, General Materials Science},
pubstate = {published},
tppubtype = {article}
}
2020
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; M.D, Sorayouth Chamnanvej
The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 2, pp. 1229–1238, 2020, ISSN: 2088-8708.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Sattayasoonthorn2020,
title = {The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej M.D},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/08/The-development-of-a-wireless-LCP-based-intracranial-pressure.pdf},
doi = {10.11591/ijece.v10i2.pp1229-1238},
issn = {2088-8708},
year = {2020},
date = {2020-04-01},
urldate = {2020-04-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {10},
number = {2},
pages = {1229--1238},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Raised intracranial pressure (ICP) in traumatic brain injury (TBI) patients can lead to death. ICP measurement is required to monitor the condition of a patient and to inform TBI treatment. This work presents a new wireless liquid crystal polymer (LCP) based ICP sensor. The sensor is designed with the purpose of measuring ICP and wirelessly transmitting the signal to an external monitoring unit. The sensor is minimally invasive and biocompatible due to the mechanical design and the use of LCP. A prototype sensor and associated wireless module are fabricated and tested to demonstrate the functionality and performance of the wireless LCP-based ICP sensor. Experimental results show that the wireless LCP-based ICP sensor can operate in the pressure range of 0 - 60.12 mmHg. Based on repeated measurements, the sensitivity of the sensor is found to be 25.62 µVmmHg-1, with a standard deviation of ± 1.16 µVmmHg-1. This work represents a significant step towards achieving a wireless, implantable, minimally invasive ICP monitoring strategy for TBI patients.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}

Pillai, Branesh M.; Wilasrusmee, Chumpon; Suthakorn, Jackrit
Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 1, pp. 828–839, 2020, ISSN: 2088-8708.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Pillai2020,
title = {Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting},
author = {Branesh M. Pillai and Chumpon Wilasrusmee and Jackrit Suthakorn},
url = {https://bartlab.org/newweb/wp-content/uploads/2023/08/19674-40468-1-PB.pdf},
doi = {10.11591/ijece.v10i1.pp828-839},
issn = {2088-8708},
year = {2020},
date = {2020-02-01},
urldate = {2020-02-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {10},
number = {1},
pages = {828--839},
publisher = {Institute of Advanced Engineering and Science},
abstract = {During laparoscopic surgeries, primary surgical tool insertion is the demanding and strenuous task. As the surgeon is unaware of the type of the tissue and associated parameters to conduct the insertion, therefore, to ease the procedure, the movement of the surgical tool needs to be controlled. It’s the operational capabilities that are to be manipulated to perform a smooth surgery even from a distant location. In this study, a robot system is being introduced for laparoscopic primary surgical tool insertion. It will incorporate a novel observer based dynamic control along with robot assisted bilateral control. Moreover, a virtual spring damper force lock system is introduced through which the slave system will notify the master regarding the target achieved and excessive force. The validation of the proposed control system is experimented with bilaterally controlled MU-LapaRobot. The experiment is comprising 3 cases of bilateral control criteria which are non-contact motion, contact motion, and limit force locking. The results defined the same value for contact and non-contact motion by 0.3N. The results depicted a force error of 3.6% and a position error of 5.8% which validated the proposed algorithm.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}

2019
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; Chamnanvej, Sorayouth
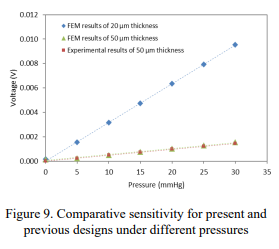
Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, 2019, ISSN: 2722-2578.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Sattayasoonthorn2019,
title = {Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/11.pdf},
doi = {10.11591/ijece.v9i5.pp4044-4052},
issn = {2722-2578},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {9},
number = {5},
publisher = {Institute of Advanced Engineering and Science},
abstract = {A biocompatible liquid crystal polymer (LCP) pressure sensor is proposed for measuring intracranial pressure (ICP) in Traumatic Brain Injury (TBI) patients. Finite element method using COMSOL multiphysics is employed to study the mechanical behavior of the packaged LCP pressure sensor in order to optimize the sensor design. A 3D model of the 8x8x0.2 mm LCP pressure sensor is simulated to investigate the parameters that significantly influence the sensor characteristics under the uniform pressure range of 0 to 50 mmHg. The simulation results of the new design are compared to the experimental results from a previous design. The result shows that reducing the thickness of the sensing membrane can increase the sensitivity up to six times of that previously reported. An improvement of fabrication methodology is proposed to complete the LCP packaging.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}
Nakdhamabhorn, Sakol; Suthakorn, Jackrit
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, iss. 1, no. 5, 2019, ISSN: 2722-2578.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Nakdhamabhorn2019,
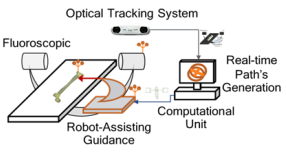
title = {System Integration of a Fluoroscopic Image Calibration using Robot Assisted Surgical Guidance for Distal Locking Process in Closed Intramedullary Nailing of Femur},
author = {Sakol Nakdhamabhorn and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/12.pdf},
doi = {10.11591/ijece.v9i5.pp3739-3750},
issn = {2722-2578},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {9},
number = {5},
issue = {1},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Distal locking procedure is one of the most complex tasks in close intramedullary nailing operation which requires fluoroscopic image to interpret 2-D distal locking position on image related to 3-D distal locking position on the patient site. Hence the surgeon has to perform the distal locking process by using multiple fluoroscopic images which causes a lot of x-ray exposure to the patient and surgeon and is a time consuming task. This paper presents the system integration of a fluoroscopic image calibration using robot assisted surgical guidance. The system integration consists of three parts; distal locking recovery, fluoroscopic calibration and tracking, and robot assisted surgical guidance. The distal locking-hole recovery algorithm is based on characteristic information of the major and minor axes of distal locking hole. The fluoroscopic calibration and tracking is modeled as pin-hole projection model to estimate a projection equation based on optical tracking system. The robot-assisted surgical guidance is developed to overlay a trajectory path using a laser beam for reducing the problem of hand – eye coordination on most surgical navigation system. We integrate each part to complete a surgical navigation system for distal locking process. The experiment of system integration is conducted to validate the accuracy of distal locking axis position and orientation. The results of the system integration shows a mean angular error of 1.10 and mean Euclidean distance in X-Y plane error of 3.65 mm.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}