2022
Nillahoot, Nantida; Pillai, Branesh M.; Sharma, Bibhu; Wilasrusmee, Chumpon; Suthakorn, Jackrit
In: Sensors, vol. 22, no. 22, 2022, ISSN: 1424-8220.
Abstract | Links | BibTeX | Tags: Analytical Chemistry, and Optics, Atomic and Molecular Physics, Biochemistry, Electrical and Electronic Engineering, Instrumentation
@article{Nillahoot2022,
title = {Interactive 3D Force/Torque Parameter Acquisition and Correlation Identification during Primary Trocar Insertion in Laparoscopic Abdominal Surgery: 5 Cases},
author = {Nantida Nillahoot and Branesh M. Pillai and Bibhu Sharma and Chumpon Wilasrusmee and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J3.pdf},
doi = {10.3390/s22228970},
issn = {1424-8220},
year = {2022},
date = {2022-11-00},
urldate = {2022-11-00},
journal = {Sensors},
volume = {22},
number = {22},
publisher = {MDPI AG},
abstract = {Laparoscopic procedures have become indispensable in gastrointestinal surgery. As a minimally invasive process, it begins with primary trocar insertion. However, this step poses the threat of injuries to the gastrointestinal tract and blood vessels. As such, the comprehension of the insertion process is crucial to the development of robotic-assisted/automated surgeries. To sustain robotic development, this research aims to study the interactive force/torque (F/T) behavior between the trocar and the abdomen during the trocar insertion process. For force/torque (F/T) data acquisition, a trocar interfaced with a six-axis F/T sensor was used by surgeons for the insertion. The study was conducted during five abdominal hernia surgical cases in the Department of Surgery, Faculty of Medicine, Ramathibodi Hospital, Mahidol University. The real-time F/T data were further processed and analyzed. The fluctuation in the force/torque (F/T) parameter was significant, with peak force ranging from 16.83 N to 61.86 N and peak torque ranging from 0.552 Nm to 1.76 Nm. The force parameter was observed to positively correlate with procedural time, while torque was found to be negatively correlated. Although during the process a surgeon applied force and torque in multiple axes, for a robotic system, the push and turn motion in a single axis was observed to be sufficient. For minimal tissue damage in less procedural time, a system with low push force and high torque was observed to be advantageous. These understandings will eventually benefit the development of computer-assisted or robotics technology to improve the outcome of the primary trocar insertion procedure.},
keywords = {Analytical Chemistry, and Optics, Atomic and Molecular Physics, Biochemistry, Electrical and Electronic Engineering, Instrumentation},
pubstate = {published},
tppubtype = {article}
}

Sharma, Bibhu; Pillai, Branesh M.; Borvorntanajanya, Korn; Suthakorn, Jackrit
Modeling and Design of a Stair Climbing Wheelchair with Pose Estimation and Adjustment Journal Article
In: J Intell Robot Syst, vol. 106, no. 3, 2022, ISSN: 1573-0409.
Links | BibTeX | Tags: Artificial Intelligence, Control and Systems Engineering, Electrical and Electronic Engineering, Industrial and Manufacturing Engineering, Mechanical Engineering, Software
@article{Sharma2022b,
title = {Modeling and Design of a Stair Climbing Wheelchair with Pose Estimation and Adjustment},
author = {Bibhu Sharma and Branesh M. Pillai and Korn Borvorntanajanya and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J4.pdf},
doi = {10.1007/s10846-022-01765-3},
issn = {1573-0409},
year = {2022},
date = {2022-11-00},
urldate = {2022-11-00},
journal = {J Intell Robot Syst},
volume = {106},
number = {3},
publisher = {Springer Science and Business Media LLC},
keywords = {Artificial Intelligence, Control and Systems Engineering, Electrical and Electronic Engineering, Industrial and Manufacturing Engineering, Mechanical Engineering, Software},
pubstate = {published},
tppubtype = {article}
}

Borvorntanajanya, Korn; Suthakorn, Jackrit
The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System Journal Article
In: IEEE Access, vol. 10, pp. 99762–99775, 2022, ISSN: 2169-3536.
Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science, General Engineering, General Materials Science
@article{Borvorntanajanya2022,
title = {The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System},
author = {Korn Borvorntanajanya and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/2J.pdf},
doi = {10.1109/access.2022.3207179},
issn = {2169-3536},
year = {2022},
date = {2022-00-00},
urldate = {2022-00-00},
journal = {IEEE Access},
volume = {10},
pages = {99762--99775},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {Electrical and Electronic Engineering, General Computer Science, General Engineering, General Materials Science},
pubstate = {published},
tppubtype = {article}
}

2021
Nillahoot, Nantida; Pillai, Branesh M.; Chumnanvej, Sorayouth; Suthakorn, Jackrit
The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 3, pp. 1368–1379, 2021, ISSN: 2302-9285.
Abstract | Links | BibTeX | Tags: Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation
@article{Nillahoot2021b,
title = {The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery},
author = {Nantida Nillahoot and Branesh M. Pillai and Sorayouth Chumnanvej and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/07/3.pdf},
doi = {10.11591/eei.v10i3.3037},
issn = {2302-9285},
year = {2021},
date = {2021-06-01},
urldate = {2021-06-01},
journal = {Bulletin of Electrical Engineering and Informatics},
volume = {10},
number = {3},
pages = {1368--1379},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Endoscopic endonasal transsphenoidal surgery (EETS) is a standard procedure to treat the pituitary adenoma, a tumor in the pituitary gland that causes malfunction of hormones. Although the method is substantially minimal invasive, the surgeon may encounter intricacies. The major challenges are narrow surgery pathway, limited working area, lack of case studies for practicing, steep learning curve owing to the intricate steps, and the tool insertion risk. To ease the neurosurgeons, this research focuses on the development and testing of the surgical simulator based on the pathway guidance and the interchangeable surgical instrument tooltip. The system was tested in human cadaver-based experiments with interchangeability in terms of function and the performance of the simulator in terms of the benefits. The experiments demonstrate the augmentation in the learning skill of the user through the simulator based on the completion time assessment and the error reduction. Furthermore, the satisfaction level of the interchangeable surgical tool, which was found using sliding switch and gripper scored 71.40%, the interchangeable tooltip function, which is a novel function to participants scored 85.6% and the practical use had 77%. The geometric aspect of the interchangeable tool scored lowest (62.80%) and was found to be moderate among the neurosurgeons.},
keywords = {Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation},
pubstate = {published},
tppubtype = {article}
}

Nakdhamabhorn, Sakol; Pillai, M. Branesh; Suthakorn, Jackrit
Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 2, pp. 619–631, 2021, ISSN: 2302-9285.
Abstract | Links | BibTeX | Tags: Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation
@article{Nakdhamabhorn2021,
title = {Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype},
author = {Sakol Nakdhamabhorn and M. Branesh Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/3_Journal_Publlished_Article.pdf},
doi = {10.11591/eei.v10i2.2331},
issn = {2302-9285},
year = {2021},
date = {2021-04-01},
urldate = {2021-04-01},
journal = {Bulletin of Electrical Engineering and Informatics},
volume = {10},
number = {2},
pages = {619--631},
publisher = {Institute of Advanced Engineering and Science},
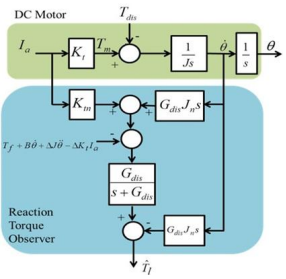
abstract = {Minimally invasive surgery (MIS) is one of the most challenging tasks in surgical procedures due to the lack of visibility of the surgical area, instrument orientation, and depth perception. A tele-operated robot assisted minimally invasive surgery is developed to enhance a surgeon's hand dexterity and accuracy. To perform MIS, the surgeon controls a slave manipulator via a master manipulator, so the force feedback and motion feedback are required to imitate an amount of action and reaction force between master and slave manipulator. The complicated MIS requires more complex surgical manipulator with multi DOFs and multiple force feedback. The limitation of multiple DOFs force feedback is a bandwidth of torque sensors. Therefore, this study proposes a sensorless based 5-DOF Bilaterally controlled surgical manipulation. In this research disturbance observer (DOB) is used to identify the internal disturbance of the system, which is used to estimate the reaction torque. This research mainly focuses on a 5-DOF bilaterally controlled surgical manipulator to maintain a position and additional force. The result of torque error in contact motion is less than 2%, the non-contact motion error is not over 5%, and it is evident that the error is always less than 0.3% for the position response.},
keywords = {Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation},
pubstate = {published},
tppubtype = {article}
}
2020
Direkwatana, Chawaphol; Suthakorn, Jackrit
Design of High Performance DC Motor Actuated Cable Driving System for Compact Devices Journal Article
In: International Journal of Power Electronics and Drive Systems (IJPEDS), vol. 11, no. 2, pp. 580–593, 2020, ISSN: 2722-256X.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, Energy Engineering and Power Technology
@article{Direkwatana2020b,
title = {Design of High Performance DC Motor Actuated Cable Driving System for Compact Devices},
author = {Chawaphol Direkwatana and Jackrit Suthakorn},
url = {https://bartlab.org/newweb/wp-content/uploads/2023/08/20622-39904-1-PB.pdf},
doi = {10.11591/ijpeds.v11.i2.pp580-593},
issn = {2722-256X},
year = {2020},
date = {2020-06-01},
urldate = {2020-06-01},
journal = {International Journal of Power Electronics and Drive Systems (IJPEDS)},
volume = {11},
number = {2},
pages = {580--593},
publisher = {Institute of Advanced Engineering and Science},
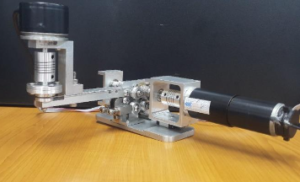
abstract = {The cable transmission is widely used in the remote operation or complex geometry with high stiffness and low backlash. Larger drum is required to reduce and error of transmission in long stroke. An error of the desired position occurs due to the fleet angle while cable winding on a drum. Therefore, a new cable driving module which overcomes this problem is proposed. A new cable driving module with a sliding platform is connected to the actuator unit. A motion of the sliding platform is corresponding to a screw rod connected to an actuator. The precision of the driving system is measured by a high-resolution rotatory encoder and high gear ratio actuator. Results are measured by load and error of the system. A load of system shows a performance of overall translation and rotation of the drum at different speeds. An error of the system is measured from forward and reverse direction by increasing and decreasing the number of turns with constant speed. A system has an average load consumption along a long stroke of cable winding which has no significant problem on the screw platform. Multiple turns have low error value in specific and continuous turn in forward and reverse motion. A new cable driving system is proved in precision movement. The fleet angle is eliminated in new mechanism. Along with a constraint motion, there is no significant change in load consumption. An error is low value in a different direction of movement. Hence, a new design of cable transmission can perform in high performance and small size of the system.},
keywords = {Electrical and Electronic Engineering, Energy Engineering and Power Technology},
pubstate = {published},
tppubtype = {article}
}
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; M.D, Sorayouth Chamnanvej
The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 2, pp. 1229–1238, 2020, ISSN: 2088-8708.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Sattayasoonthorn2020,
title = {The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej M.D},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/08/The-development-of-a-wireless-LCP-based-intracranial-pressure.pdf},
doi = {10.11591/ijece.v10i2.pp1229-1238},
issn = {2088-8708},
year = {2020},
date = {2020-04-01},
urldate = {2020-04-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {10},
number = {2},
pages = {1229--1238},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Raised intracranial pressure (ICP) in traumatic brain injury (TBI) patients can lead to death. ICP measurement is required to monitor the condition of a patient and to inform TBI treatment. This work presents a new wireless liquid crystal polymer (LCP) based ICP sensor. The sensor is designed with the purpose of measuring ICP and wirelessly transmitting the signal to an external monitoring unit. The sensor is minimally invasive and biocompatible due to the mechanical design and the use of LCP. A prototype sensor and associated wireless module are fabricated and tested to demonstrate the functionality and performance of the wireless LCP-based ICP sensor. Experimental results show that the wireless LCP-based ICP sensor can operate in the pressure range of 0 - 60.12 mmHg. Based on repeated measurements, the sensitivity of the sensor is found to be 25.62 µVmmHg-1, with a standard deviation of ± 1.16 µVmmHg-1. This work represents a significant step towards achieving a wireless, implantable, minimally invasive ICP monitoring strategy for TBI patients.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}

Pillai, Branesh M.; Wilasrusmee, Chumpon; Suthakorn, Jackrit
Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 1, pp. 828–839, 2020, ISSN: 2088-8708.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Pillai2020,
title = {Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting},
author = {Branesh M. Pillai and Chumpon Wilasrusmee and Jackrit Suthakorn},
url = {https://bartlab.org/newweb/wp-content/uploads/2023/08/19674-40468-1-PB.pdf},
doi = {10.11591/ijece.v10i1.pp828-839},
issn = {2088-8708},
year = {2020},
date = {2020-02-01},
urldate = {2020-02-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {10},
number = {1},
pages = {828--839},
publisher = {Institute of Advanced Engineering and Science},
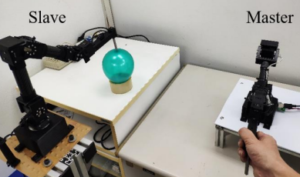
abstract = {During laparoscopic surgeries, primary surgical tool insertion is the demanding and strenuous task. As the surgeon is unaware of the type of the tissue and associated parameters to conduct the insertion, therefore, to ease the procedure, the movement of the surgical tool needs to be controlled. It’s the operational capabilities that are to be manipulated to perform a smooth surgery even from a distant location. In this study, a robot system is being introduced for laparoscopic primary surgical tool insertion. It will incorporate a novel observer based dynamic control along with robot assisted bilateral control. Moreover, a virtual spring damper force lock system is introduced through which the slave system will notify the master regarding the target achieved and excessive force. The validation of the proposed control system is experimented with bilaterally controlled MU-LapaRobot. The experiment is comprising 3 cases of bilateral control criteria which are non-contact motion, contact motion, and limit force locking. The results defined the same value for contact and non-contact motion by 0.3N. The results depicted a force error of 3.6% and a position error of 5.8% which validated the proposed algorithm.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}

2019
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; Chamnanvej, Sorayouth
Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, 2019, ISSN: 2722-2578.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Sattayasoonthorn2019,
title = {Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/11.pdf},
doi = {10.11591/ijece.v9i5.pp4044-4052},
issn = {2722-2578},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {9},
number = {5},
publisher = {Institute of Advanced Engineering and Science},
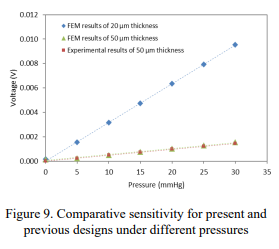
abstract = {A biocompatible liquid crystal polymer (LCP) pressure sensor is proposed for measuring intracranial pressure (ICP) in Traumatic Brain Injury (TBI) patients. Finite element method using COMSOL multiphysics is employed to study the mechanical behavior of the packaged LCP pressure sensor in order to optimize the sensor design. A 3D model of the 8x8x0.2 mm LCP pressure sensor is simulated to investigate the parameters that significantly influence the sensor characteristics under the uniform pressure range of 0 to 50 mmHg. The simulation results of the new design are compared to the experimental results from a previous design. The result shows that reducing the thickness of the sensing membrane can increase the sensitivity up to six times of that previously reported. An improvement of fabrication methodology is proposed to complete the LCP packaging.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}
Nakdhamabhorn, Sakol; Suthakorn, Jackrit
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, iss. 1, no. 5, 2019, ISSN: 2722-2578.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Nakdhamabhorn2019,
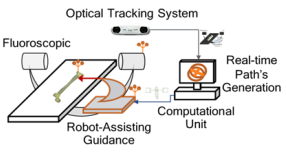
title = {System Integration of a Fluoroscopic Image Calibration using Robot Assisted Surgical Guidance for Distal Locking Process in Closed Intramedullary Nailing of Femur},
author = {Sakol Nakdhamabhorn and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/12.pdf},
doi = {10.11591/ijece.v9i5.pp3739-3750},
issn = {2722-2578},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {9},
number = {5},
issue = {1},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Distal locking procedure is one of the most complex tasks in close intramedullary nailing operation which requires fluoroscopic image to interpret 2-D distal locking position on image related to 3-D distal locking position on the patient site. Hence the surgeon has to perform the distal locking process by using multiple fluoroscopic images which causes a lot of x-ray exposure to the patient and surgeon and is a time consuming task. This paper presents the system integration of a fluoroscopic image calibration using robot assisted surgical guidance. The system integration consists of three parts; distal locking recovery, fluoroscopic calibration and tracking, and robot assisted surgical guidance. The distal locking-hole recovery algorithm is based on characteristic information of the major and minor axes of distal locking hole. The fluoroscopic calibration and tracking is modeled as pin-hole projection model to estimate a projection equation based on optical tracking system. The robot-assisted surgical guidance is developed to overlay a trajectory path using a laser beam for reducing the problem of hand – eye coordination on most surgical navigation system. We integrate each part to complete a surgical navigation system for distal locking process. The experiment of system integration is conducted to validate the accuracy of distal locking axis position and orientation. The results of the system integration shows a mean angular error of 1.10 and mean Euclidean distance in X-Y plane error of 3.65 mm.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}
Pillai, Branesh M.; Suthakorn, Jackrit
Challenges for Novice Developers in Rough Terrain Rescue Robots: A Survey on Motion Control Systems Journal Article
In: Journal of Control Science and Engineering, vol. 2019, pp. 1–12, 2019, ISSN: 1687-5257.
Abstract | Links | BibTeX | Tags: Computer Science Applications, Electrical and Electronic Engineering, Modeling and Simulation
@article{Pillai2019,
title = {Challenges for Novice Developers in Rough Terrain Rescue Robots: A Survey on Motion Control Systems},
author = {Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/10.pdf},
doi = {10.1155/2019/2135914},
issn = {1687-5257},
year = {2019},
date = {2019-06-02},
urldate = {2019-06-02},
journal = {Journal of Control Science and Engineering},
volume = {2019},
pages = {1--12},
publisher = {Hindawi Limited},
abstract = {Several researchers have revealed the huge potentials of rescue robots in disaster zones. In addition to searching for victims, these intelligent machines are also effective in obtaining useful information from the zones. These functions help to optimize the search and rescue missions. However, the fact that rescue robots have to operate in risky and dangerous environments necessitates the need for such machines to have an efficient motion control system, which can help them to operate autonomously or with minimal human control. This paper reviews the use of reliable controllers in enhancing the sensing capabilities of rescue robots. Huge potential of sensorless sensing method in the rescue robots are highlighted. It is shown that the use of sensorless sensing method enables developer to create simple and cheaper robots for various complex situations. Thus, it is imperative to conduct further studies on how to optimize the operations of robots that lack sensors.},
keywords = {Computer Science Applications, Electrical and Electronic Engineering, Modeling and Simulation},
pubstate = {published},
tppubtype = {article}
}

Pillai, Branesh M; Suthakorn, Jackrit
Motion Control Applications: Observer Based DC Motor Parameters Estimation for Novices Journal Article
In: International Journal of Power Electronics and Drive Systems (IJPEDS), vol. 10, no. 1, pp. 195–210, 2019, ISSN: 2088-8694.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, Energy Engineering and Power Technology
@article{Pillai2019b,
title = {Motion Control Applications: Observer Based DC Motor Parameters Estimation for Novices},
author = {Branesh M Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/15.pdf},
doi = {10.11591/ijpeds.v10.i1.pp195-210},
issn = {2088-8694},
year = {2019},
date = {2019-03-01},
urldate = {2019-03-01},
journal = {International Journal of Power Electronics and Drive Systems (IJPEDS)},
volume = {10},
number = {1},
pages = {195--210},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Estimation of motor inertia and friction components is a complex and challenging task in motion control applications where small size DC motors (<100W) are used for precise control. It is essential to estimate the accurate friction components and motor inertia, because the parameters provided by the manufacturer are not always accurate. This research proposes a Sensorless method of determining DC motor parameters, including moment of inertia, torque coefficient and frictional components using the Disturbance Observer (DOB) as a torque sensor. The constant velocity motion test and a novel Reverse Motion Acceleration test were conducted to estimate frictional components and moment of inertia of the motor. The validity of the proposed novel method was verified by experimental results and compared with conventional acceleration and deceleration motion tests. Experiments have been carried out to show the effectiveness and viability of the estimated parameters using a Reaction Torque Observer (RTOB) based friction compensation method.},
keywords = {Electrical and Electronic Engineering, Energy Engineering and Power Technology},
pubstate = {published},
tppubtype = {article}
}