2021
Nillahoot, Nantida; Pillai, Branesh M.; Chumnanvej, Sorayouth; Suthakorn, Jackrit
The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 3, pp. 1368–1379, 2021, ISSN: 2302-9285.
Abstract | Links | BibTeX | Tags: Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation
@article{Nillahoot2021b,
title = {The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery},
author = {Nantida Nillahoot and Branesh M. Pillai and Sorayouth Chumnanvej and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/07/3.pdf},
doi = {10.11591/eei.v10i3.3037},
issn = {2302-9285},
year = {2021},
date = {2021-06-01},
urldate = {2021-06-01},
journal = {Bulletin of Electrical Engineering and Informatics},
volume = {10},
number = {3},
pages = {1368--1379},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Endoscopic endonasal transsphenoidal surgery (EETS) is a standard procedure to treat the pituitary adenoma, a tumor in the pituitary gland that causes malfunction of hormones. Although the method is substantially minimal invasive, the surgeon may encounter intricacies. The major challenges are narrow surgery pathway, limited working area, lack of case studies for practicing, steep learning curve owing to the intricate steps, and the tool insertion risk. To ease the neurosurgeons, this research focuses on the development and testing of the surgical simulator based on the pathway guidance and the interchangeable surgical instrument tooltip. The system was tested in human cadaver-based experiments with interchangeability in terms of function and the performance of the simulator in terms of the benefits. The experiments demonstrate the augmentation in the learning skill of the user through the simulator based on the completion time assessment and the error reduction. Furthermore, the satisfaction level of the interchangeable surgical tool, which was found using sliding switch and gripper scored 71.40%, the interchangeable tooltip function, which is a novel function to participants scored 85.6% and the practical use had 77%. The geometric aspect of the interchangeable tool scored lowest (62.80%) and was found to be moderate among the neurosurgeons.},
keywords = {Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation},
pubstate = {published},
tppubtype = {article}
}

Nakdhamabhorn, Sakol; Pillai, M. Branesh; Suthakorn, Jackrit
Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 2, pp. 619–631, 2021, ISSN: 2302-9285.
Abstract | Links | BibTeX | Tags: Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation
@article{Nakdhamabhorn2021,
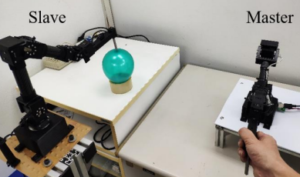
title = {Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype},
author = {Sakol Nakdhamabhorn and M. Branesh Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/3_Journal_Publlished_Article.pdf},
doi = {10.11591/eei.v10i2.2331},
issn = {2302-9285},
year = {2021},
date = {2021-04-01},
urldate = {2021-04-01},
journal = {Bulletin of Electrical Engineering and Informatics},
volume = {10},
number = {2},
pages = {619--631},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Minimally invasive surgery (MIS) is one of the most challenging tasks in surgical procedures due to the lack of visibility of the surgical area, instrument orientation, and depth perception. A tele-operated robot assisted minimally invasive surgery is developed to enhance a surgeon's hand dexterity and accuracy. To perform MIS, the surgeon controls a slave manipulator via a master manipulator, so the force feedback and motion feedback are required to imitate an amount of action and reaction force between master and slave manipulator. The complicated MIS requires more complex surgical manipulator with multi DOFs and multiple force feedback. The limitation of multiple DOFs force feedback is a bandwidth of torque sensors. Therefore, this study proposes a sensorless based 5-DOF Bilaterally controlled surgical manipulation. In this research disturbance observer (DOB) is used to identify the internal disturbance of the system, which is used to estimate the reaction torque. This research mainly focuses on a 5-DOF bilaterally controlled surgical manipulator to maintain a position and additional force. The result of torque error in contact motion is less than 2%, the non-contact motion error is not over 5%, and it is evident that the error is always less than 0.3% for the position response.},
keywords = {Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation},
pubstate = {published},
tppubtype = {article}
}