
2022
Bohara, Smriti; Suthakorn, Jackrit
Surface Coating of Orthopedic Implant to Enhance the Osseointegration and Reduction of Bacterial Colonization: A Review Journal Article
In: Biomaterials Research, vol. 26, no. 1, pp. 1–17, 2022, ISSN: 2055-7124.
Abstract | Links | BibTeX | Tags: Biomaterials, Biomedical Engineering, Ceramics and Composites, Medicine (miscellaneous)
@article{Bohara2022,
title = {Surface Coating of Orthopedic Implant to Enhance the Osseointegration and Reduction of Bacterial Colonization: A Review},
author = {Smriti Bohara and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/3J.pdf},
doi = {10.1186/s40824-022-00269-3},
issn = {2055-7124},
year = {2022},
date = {2022-12-00},
urldate = {2022-12-00},
journal = {Biomaterials Research},
volume = {26},
number = {1},
pages = {1--17},
publisher = {Springer Science and Business Media LLC},
abstract = {The use of orthopedic implants in surgical technology has fostered restoration of physiological functions. Along with successful treatment, orthopedic implants suffer from various complications and fail to offer functions correspondent to native physiology. The major problems include aseptic and septic loosening due to bone nonunion and implant site infection due to bacterial colonization. Crucial advances in material selection in the design and development of coating matrixes an opportunity for the prevention of implant failure. However, many coating materials are limited in <jats:italic>in-vitro</jats:italic> testing and few of them thrive in clinical tests. The rate of implant failure has surged with the increasing rates of revision surgery creating physical and sensitive discomfort as well as economic burdens. To overcome critical pathogenic activities several systematic coating techniques have been developed offering excellent results that combat infection and enhance bone integration. This review article includes some more common implant coating matrixes with excellent in vitro and in vivo results focusing on infection rates, causes, complications, coating materials, host immune responses and significant research gaps. This study provides a comprehensive overview of potential coating technology, with functional combination coatings which are focused on ultimate clinical practice with substantial improvement on in-vivo tests. This includes the development of rapidly growing hydrogel coating techniques with the potential to generate several accurate and precise coating procedures.},
keywords = {Biomaterials, Biomedical Engineering, Ceramics and Composites, Medicine (miscellaneous)},
pubstate = {published},
tppubtype = {article}
}

Sharma, Bibhu; Pillai, Branesh M.; Suthakorn, Jackrit
Biomechanical Trajectory Optimization of Human Sit-to-Stand Motion with Stochastic Motion Planning Framework Journal Article
In: IEEE Transactions on Medical Robotics and Bionics, vol. 4, no. 4, pp. 1022–1033, 2022, ISSN: 2576-3202.
Links | BibTeX | Tags: Artificial Intelligence, Biomedical Engineering, Computer Science Applications, Control and Optimization, Human-Computer Interaction
@article{Sharma2022,
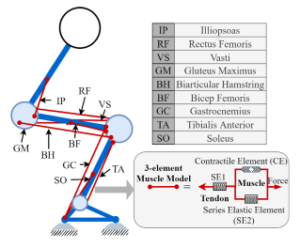
title = {Biomechanical Trajectory Optimization of Human Sit-to-Stand Motion with Stochastic Motion Planning Framework},
author = {Bibhu Sharma and Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J2.pdf},
doi = {10.1109/tmrb.2022.3205509},
issn = {2576-3202},
year = {2022},
date = {2022-11-00},
urldate = {2022-11-00},
journal = { IEEE Transactions on Medical Robotics and Bionics},
volume = {4},
number = {4},
pages = {1022--1033},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {Artificial Intelligence, Biomedical Engineering, Computer Science Applications, Control and Optimization, Human-Computer Interaction},
pubstate = {published},
tppubtype = {article}
}
2021
Bohara, Smriti; Rohner, Nathan; Budziszewski, Emily; Suthakorn, Jackrit; von Recum, Horst A.; Exner, Agata A.
Ultrasound Triggered Drug Release from Affinity-Based β-Cyclodextrin Polymers for Infection Control Journal Article
In: Annals of Biomedical Engineering, vol. 49, no. 9, pp. 2513–2521, 2021, ISSN: 1573-9686.
Links | BibTeX | Tags: Biomedical Engineering
@article{Bohara2021,
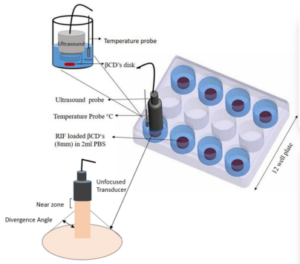
title = {Ultrasound Triggered Drug Release from Affinity-Based β-Cyclodextrin Polymers for Infection Control},
author = {Smriti Bohara and Nathan Rohner and Emily Budziszewski and Jackrit Suthakorn and Horst A. von Recum and Agata A. Exner},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/1.pdf},
doi = {10.1007/s10439-021-02814-y},
issn = {1573-9686},
year = {2021},
date = {2021-09-00},
urldate = {2021-09-00},
journal = {Annals of Biomedical Engineering},
volume = {49},
number = {9},
pages = {2513--2521},
publisher = {Springer Science and Business Media LLC},
howpublished = {Epub ahead of print},
keywords = {Biomedical Engineering},
pubstate = {published},
tppubtype = {article}
}
Nillahoot, Nantida; Patel, Sneha; Suthakorn, Jackrit
In: The Open Biomedical Engineering Journal (TOBEJ), vol. 15, no. 1, pp. 16–28, 2021, ISSN: 1874-1207.
Abstract | Links | BibTeX | Tags: Bioengineering, Biomedical Engineering, Medicine (miscellaneous)
@article{Nillahoot2021,
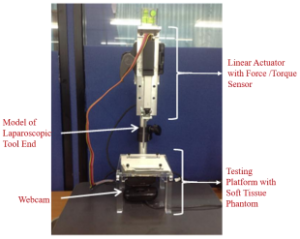
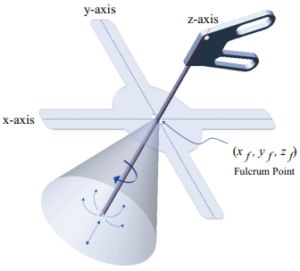
title = {A Technique for Mimicking Soft Tissue Manipulation from Experimental Data to a Wave Equation Model for a New Laparoscopic Virtual Reality Training System},
author = {Nantida Nillahoot and Sneha Patel and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/2.pdf},
doi = {10.2174/1874120702115010016},
issn = {1874-1207},
year = {2021},
date = {2021-06-22},
urldate = {2021-06-22},
journal = {The Open Biomedical Engineering Journal (TOBEJ)},
volume = {15},
number = {1},
pages = {16--28},
publisher = {Bentham Science Publishers Ltd.},
abstract = {Background: The difficulty of laparoscopic procedures and the specific psychomotor skills required support the need for a training system for intensive and repetitive practice to acquire the specific skills. The present VR training systems have some limitations with respect to the soft tissue models in the training system. This is associated with the need for a real-time simulation, which requires a balance between computational cost and accuracy.
Objective: The primary objective of the study is to develop a two dimensional wave equation model that closely mimics the soft tissue manipulation in a laparoscopic procedure for a VR training system.
Methods: A novel mathematical model based on the wave equation is prepared to represent the interaction between the laparoscopic tool and the soft tissue. The parameters within the model are determined through experimental analysis of a soft tissue phantom. The experimental setup involves a linear actuator applying force to the soft tissue phantom to generate deformation. Data acquisition is conducted through a camera and a robotic force acquisition system which measures force, displacement of the linear actuator and records a video. Through image processing, the displacements of the markers on the phantom’s x-y plane during its deformation are determined and these parameters are used to develop the model, which finally is validated through a comparative analysis.
Results: The results from the developed model are observed and compared statistically as well as graphically with the finite element model based on deformation data. The results show that the deformation data between the developed model and the available model is significantly similar.
Conclusion: This study demonstrates the adaptability of the wave equation to meet the needs of the specific surgical procedure through modification of the model based on the experimental data. Moreover, the comparative analysis further corroborates the relevance and validity of the model for the surgical training system.},
keywords = {Bioengineering, Biomedical Engineering, Medicine (miscellaneous)},
pubstate = {published},
tppubtype = {article}
}
Objective: The primary objective of the study is to develop a two dimensional wave equation model that closely mimics the soft tissue manipulation in a laparoscopic procedure for a VR training system.
Methods: A novel mathematical model based on the wave equation is prepared to represent the interaction between the laparoscopic tool and the soft tissue. The parameters within the model are determined through experimental analysis of a soft tissue phantom. The experimental setup involves a linear actuator applying force to the soft tissue phantom to generate deformation. Data acquisition is conducted through a camera and a robotic force acquisition system which measures force, displacement of the linear actuator and records a video. Through image processing, the displacements of the markers on the phantom’s x-y plane during its deformation are determined and these parameters are used to develop the model, which finally is validated through a comparative analysis.
Results: The results from the developed model are observed and compared statistically as well as graphically with the finite element model based on deformation data. The results show that the deformation data between the developed model and the available model is significantly similar.
Conclusion: This study demonstrates the adaptability of the wave equation to meet the needs of the specific surgical procedure through modification of the model based on the experimental data. Moreover, the comparative analysis further corroborates the relevance and validity of the model for the surgical training system.
2020
Direkwatana, Chawaphol; Suthakorn, Jackrit; Wilasrussamee, Chumpon
MU-LapaRobot: A Corporative Surgical Robot for Laparoscopic Surgery Journal Article
In: The Open Biomedical Engineering Journal (TOBEJ), vol. 14, no. 1, pp. 43–54, 2020, ISSN: 1874-1207.
Abstract | Links | BibTeX | Tags: Bioengineering, Biomedical Engineering, Medicine (miscellaneous)
@article{Direkwatana2020,
title = {MU-LapaRobot: A Corporative Surgical Robot for Laparoscopic Surgery},
author = {Chawaphol Direkwatana and Jackrit Suthakorn and Chumpon Wilasrussamee},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/4_Journal_Published_Article.pdf},
doi = {10.2174/1874120702014010043},
issn = {1874-1207},
year = {2020},
date = {2020-10-26},
urldate = {2020-10-26},
journal = {The Open Biomedical Engineering Journal (TOBEJ)},
volume = {14},
number = {1},
pages = {43--54},
publisher = {Bentham Science Publishers Ltd.},
abstract = {Objective: Development of surgical instrument robot (MU-LapaRobot) for assisting in conventional laparoscopic surgery.
Methods: A robot was designed based on instrument movement for a conventional procedure. The mechanism mimics and constrains manipulationmovement through the wire-driven transmission. It is flexible for robot end-effector, which has a lightweight and small size. The usability of therobot is passive and active robot tasks with an interconnected driving system. Three main parts of the robot are robot end-effector, transmission,and a driving system.
Results: On a robot platform, a parameter for setup is robot posture. The adjustment of robot position and projection of manipulation area is influenced bythe accuracy of movement. To verify movement, command and exact movements are measured. Compensation with the control system is improvedin order to improve the accuracy of the system.
Conclusion: MU-LapaRobot provides surgical instrument manipulation by using wire-driven transmission with an effective system and requires lessinterference in the conventional operation.},
keywords = {Bioengineering, Biomedical Engineering, Medicine (miscellaneous)},
pubstate = {published},
tppubtype = {article}
}
Methods: A robot was designed based on instrument movement for a conventional procedure. The mechanism mimics and constrains manipulationmovement through the wire-driven transmission. It is flexible for robot end-effector, which has a lightweight and small size. The usability of therobot is passive and active robot tasks with an interconnected driving system. Three main parts of the robot are robot end-effector, transmission,and a driving system.
Results: On a robot platform, a parameter for setup is robot posture. The adjustment of robot position and projection of manipulation area is influenced bythe accuracy of movement. To verify movement, command and exact movements are measured. Compensation with the control system is improvedin order to improve the accuracy of the system.
Conclusion: MU-LapaRobot provides surgical instrument manipulation by using wire-driven transmission with an effective system and requires lessinterference in the conventional operation.
Suthakorn, Jackrit; Tanaiutchawoot, Narucha; Wiratkapan, Cholatip
Ultrasound Calibration with Ladder Phantom at Multiple Depths for Breast Biopsy Navigation System Journal Article
In: Theoretical and Applied Mechanics Letters, vol. 10, no. 5, pp. 343–353, 2020, ISSN: 2095-0349.
Links | BibTeX | Tags: Aerospace Engineering, Biomedical Engineering, Civil and Structural Engineering, Computational Mechanics, Environmental Engineering, Mechanical Engineering, Mechanics of Materials, Ocean Engineering
@article{Suthakorn2020,
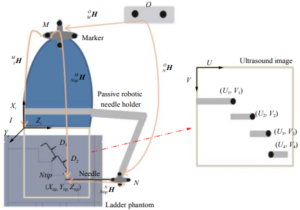
title = {Ultrasound Calibration with Ladder Phantom at Multiple Depths for Breast Biopsy Navigation System},
author = {Jackrit Suthakorn and Narucha Tanaiutchawoot and Cholatip Wiratkapan},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/4.pdf},
doi = {10.1016/j.taml.2020.01.037},
issn = {2095-0349},
year = {2020},
date = {2020-07-00},
urldate = {2020-07-00},
journal = {Theoretical and Applied Mechanics Letters},
volume = {10},
number = {5},
pages = {343--353},
publisher = {Elsevier BV},
keywords = {Aerospace Engineering, Biomedical Engineering, Civil and Structural Engineering, Computational Mechanics, Environmental Engineering, Mechanical Engineering, Mechanics of Materials, Ocean Engineering},
pubstate = {published},
tppubtype = {article}
}
2019
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; Chamnanvej, Sorayouth
On the Feasibility of a Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Measurement Journal Article
In: Biomedical Engineering/Biomedizinische Technik (BMT), vol. 64, no. 5, pp. 543–553, 2019, ISSN: 1862-278X.
Abstract | Links | BibTeX | Tags: Biomedical Engineering
@article{Sattayasoonthorn2019b,
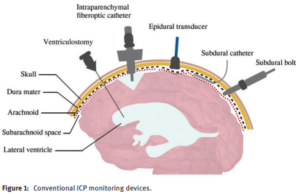
title = {On the Feasibility of a Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Measurement},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/13.pdf},
doi = {10.1515/bmt-2018-0029},
issn = {1862-278X},
year = {2019},
date = {2019-09-25},
urldate = {2019-09-25},
journal = {Biomedical Engineering/Biomedizinische Technik (BMT)},
volume = {64},
number = {5},
pages = {543--553},
publisher = {Walter de Gruyter GmbH},
abstract = {Intracranial pressure (ICP) monitoring is crucial in determining the appropriate treatment in traumatic brain injury. Minimally invasive approaches to monitor ICP are subject to ongoing research because they are expected to reduce infections and complications associated with conventional devices. This study aims to develop a wireless ICP monitoring device that is biocompatible, miniature and implantable. Liquid crystal polymer (LCP) was selected to be the main material for the device fabrication. This study considers the design, fabrication and testing of the sensing unit of the proposed wireless ICP monitoring device. A piezoresistive pressure sensor was designed to respond to 0–50 mm Hg applied pressure and fabricated on LCP by standard microelectromechanical systems (MEMS) procedures. The fabricated LCP pressure sensor was studied in a moist environment by means of a hydrostatic pressure test. The results showed a relative change in voltage and pressure from which the sensor’s sensitivity was deduced. This was a proof-of-concept study and based on the results of this study, a number of recommendations for improving the considered sensor performance were made. The limitations are discussed, and future design modifications are proposed that should lead to a complete LCP package with an improved performance for wireless, minimally invasive ICP monitoring.},
keywords = {Biomedical Engineering},
pubstate = {published},
tppubtype = {article}
}
2006
U.-Thainual, P.; Suthakorn, J.
A New Algorithm for Recovering Distal Holes' Pose in Intramedullary Nail Journal Article
In: Journal of Biomechanics, vol. 39, pp. 209, 2006, ISSN: 0021-9290.
Links | BibTeX | Tags: Biomedical Engineering, Biophysics, Orthopedics and Sports Medicine, Rehabilitation
@article{U.-Thainual2006,
title = {A New Algorithm for Recovering Distal Holes' Pose in Intramedullary Nail},
author = {P. U.-Thainual and J. Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/A_new_Algorithm_for_Recovering_Distal_Holes-Pose_in_intramedullary_nail.pdf},
doi = {10.1016/s0021-9290(06)83764-4},
issn = {0021-9290},
year = {2006},
date = {2006-01-00},
urldate = {2006-01-00},
journal = {Journal of Biomechanics},
volume = {39},
pages = {209},
publisher = {Elsevier BV},
keywords = {Biomedical Engineering, Biophysics, Orthopedics and Sports Medicine, Rehabilitation},
pubstate = {published},
tppubtype = {article}
}