
2014
A Study for Design and Development of Control System for A New 1-DOF Haptic Device Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), pp. 39–45, Bangkok, Thailand, 2014.
Design and Analysis of a New 1-DOF Haptic Device Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), Bangkok, Thailand, pp. 46–51, Bangkok, Thailand, 2014.
Mathematical Model of Soft Tissue in Veress Needle Insertion for Haptics Implementation Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), pp. 52–58, 2014.

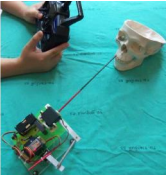
An Experiment on Communication Assessment for an Ongoing Tele-Surgical Robot Research in Thailand Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), pp. 91–95, 2014.
2012
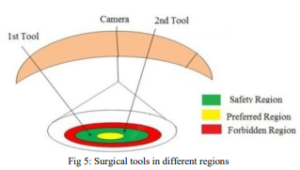
Layered Workspace Based Control Algorithm for Collision Avoidance in a Laparoscopic Surgical Robot: µ-LapaRobot Proceedings Article
In: Proceedings of the 35th Electrical Engineering Conference (EECON-35), Pattaya Thailand, 2012.
In: Proceedings of the 35th Electrical Engineering Conference (EECON-35), Pattaya, Thailand, 2012.
Workspace Based Design Proposal for Surgical Robot with Endoscopic Endonasal Transsphenoidal Approach Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 79–81, Nakorn Phatom, Thailand, 2012.
Surgical Robotics System MU-LapaRobot Proceedings Article
In: Proceedings of 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), Nakorn Phatom, Thailand, 2012.
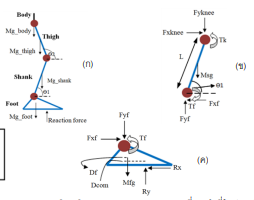
Motion Analysis of BART LAB LL-EXO1 Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 11–14, 2012.

Introduction to A Walking – Assisted Robot, BART LAB LL-EXO1 Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 7–10, Nakorn Phatom, Thailand, 2012.
Haptic Simulation Training System for Abdominal Wall Surgery Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 77–78, Nakorn Phatom, Thailand, 2012.
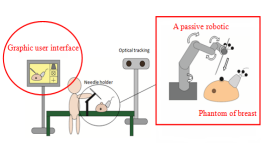
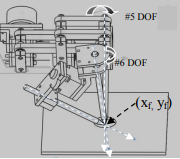
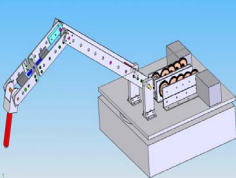
On the Design of a Passive Robotic Breast Biopsy Needle Holder and Its 3D Graphical Human-Machine Interaction Based on 3D Slicer Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), Nakorn Phatom, pp. 82–85, Nakorn Phatom, Thailand, 2012.
Multi Sensor Array and Graphical User Interface Integrated with Comfortable Socks (Magic Socks) Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 140–143, Nakorn Phatom, Thailand, 2012.

2011
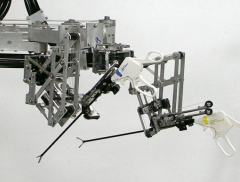
MU-LapaRobot: A Novel 4-DOF Wire-Driven Laparoscopic Surgical Robot System for Cooperative and Tele-Operative Procedures Proceedings Article
In: Proceedings of the 34th Electrical Engineering Conference (EECON-34), pp. 1141–1144, Pattaya, Thailand, 2011.

Workspace Analysis for a New Design Laparoscopic Robotic Manipulator", MU-LapaRobot1" Proceedings Article
In: Proceedings of the 20th National Grad Research Conference, pp. 128, Thailand, 2011.
2007
SET Robot Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.
Medical Tool Positioning System Using Ultrasonic Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.

Motion Control of Intelligence Vehicle Using Camera and Other Systems Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.

Kinematic Analysis for Rotary Protein Manipulation Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.
2005
M.U. Binary Hyper-Redundant Robotic Manipulator Proceedings Article
In: Proceedings of the 2005 TRS Conference on Robotics and Industrial Technology (CRIT 2005), pp. 33–41, Nonthaburi, Thailand, 2005.
2004
Toward Self-Replicating Robots: An Overview on Self-Replicating Machine Proceedings Article
In: Proceedings of the 2004 TRS Conference on Robotics and Industrial Technology (CRIT 2004), Nakorn Phatom, Thailand, 2004.