2011
A Study of Rotary-Brake Design for Utilizing in Motorized Upper Limb Prosthesis Proceedings Article
In: Proceedings of the 2011 International Conference on Computer Control and Automation (ICCCA 2011), pp. 129-133, Jeju Island, South Korea,, 2011.
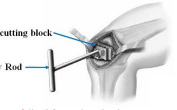
A Novel Conceptual Design on Robotic Bone-Cutting Device Based on Kinematic Analysis: Toward Development of a Novel Robot-Assisted Total Knee Replacement Surgical System Proceedings Article
In: Proceedings of the 2011 International Conference on Computer Control and Automation (ICCCA 2011), pp. 139-142, Jeju Island, South Korea, 2011.
Kinematics Comparison Tool for Alignment Adjusting in Total Knee Replacement Surgical Planning Proceedings Article
In: Proceedings of the 2011 International Conference on Computer Control and Automation (ICCCA 2011), pp. 143–147, Jeju Island, South Korea, 2011.
Force Acquisition on Surgical Instruments for Virtual Reality Surgical Training System Proceedings Article
In: Proceedings of the 2011 International Conference on Computer Control and Automation (ICCCA 2011), pp. 173–176, Jeju Island, South Korea, 2011.

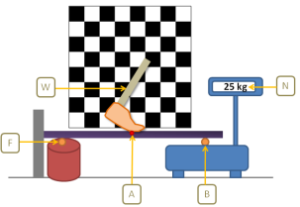
Design of a Simple Experiment Scheme for Roll-Over Shape Testing Proceedings Article
In: Proceedings of the Technically Assisted Rehabilitation (TAR 2011), Berlin, Germany, 2011.
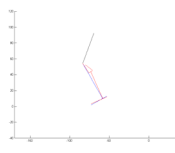
Foot Clearance during Free Swing of a Transfemoral Prosthetic Leg: Four-Bar Knee vs. Ankle Dorsiflexion Proceedings Article
In: Proceedings of the Technically Assisted Rehabilitation (TAR 2011), Berlin, Germany, 2011.
Development of Wire-Driven Laparoscopic Surgical Robotic System, “MU-LapaRobot” Proceedings Article
In: 2011 IEEE International Conference on Robotics and Biomimetics, pp. 485-490, 2011.

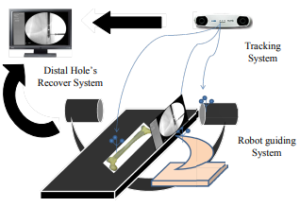
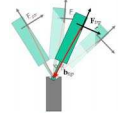
A Novel Surgical Navigation Concept for Closed Intramedullary Nailing of Femur using 4-DOF Laser-Guiding Robot Proceedings Article
In: 2011 IEEE International Conference on Robotics and Biomimetics, pp. 479-484, 2011.
2010
Non-Radiological Colonoscope Tracking Image Guided Colonoscopy using Commercially Available Electromagnetic Tracking System Proceedings Article
In: 2010 IEEE Conference on Robotics, Automation and Mechatronics, pp. 62-67, Singapore, 2010.
2009
Development of A Novel Robotic Monofilament Probe for Diabetic Neuropathy Screening Proceedings Article
In: Proceedings of the 4th International Symposium on Biomedical Engineering in 2009 (ISBME 2009), Bangkok, Thailand, 2009.

On the Design and Development of a Rough Terrain Robot for Rescue Missions Proceedings Article
In: 2008 IEEE International Conference on Robotics and Biomimetics, pp. 1830-1835, Bangkok, Thailand, 2009.
Toward Robot-Assisted Dental Surgery: Path Generation and Navigation System using Optical Tracking Approach Proceedings Article
In: 2008 IEEE International Conference on Robotics and Biomimetics, pp. 1212-1217, Bangkok, Thailand, 2009.

2008
Design of a New Laparoscopic-Holder Assisting Robot Proceedings Article
In: Proceeding of the 3rd International Symposium on Biomedical Engineering in 2008 (ISBME 2008), pp. 278–281, Bangkok, Thailand, 2008.
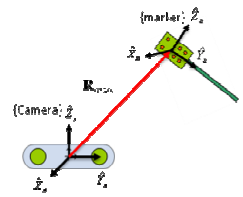
Optical Marker Recognition and Pose Determination using Neural Networks: Toward Development of a Dental Surgical Navigation System Proceedings Article
In: Proceedings of the 22nd International Congress of Computer Assisted Radiology and Surgery (CARS 2008), Barcelona, Spain, 2008.
Pose Recovery of Intramedullary Nail Distal Hole using Neural Networks Proceedings Article
In: Proceedings of the 2008 International Society for Computer Assisted Orthopedic Surgery (CAOS 2008), Hong Kong, 2008.
Point-Cloud-To-Point-Cloud Technique on Tool Calibration for Dental Implant Surgical Path Tracking Proceedings Article
In: Miga, Michael I.; Cleary, Kevin R. (Ed.): Proceedings of the SPIE Medical Imaging 2008 (SPIE 2008), SPIE, San Diego, California, USA, 2008.
2007
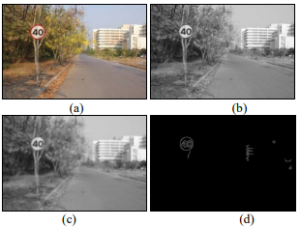
Traffic Sign Recognition for Intelligent Vehicle/Driver Assistance System Using Neural Network on OpenCV Proceedings Article
In: Proceedings of the 4th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2007), pp. 279–284, POSTECH, Pohang, South Korea, 2007.
Development of Dental Implant Navigation System in Thailand Proceedings Article
In: roceedings of the 1st International Bone and Dental Technology Symposium 2007 (Bone 2007), pp. 76–78, Bangkok, Thailand, 2007.

Dental Tool Calibration Using Point-Cloud-To-Point cloud Technique with the Least-Square Solution: Toward Development of a Dental Navigation System Proceedings Article
In: Proceedings of the 3rd WACBE World Congress on Bioengineering 2007, Bangkok, Thailand, 2007.
An Efficient Algorithm for Recovering Distal Holes' Axes in Intramedullary Nail Proceedings Article
In: Proceedings of the 3rd WACBE World Congress on Bioengineering 2007, Bangkok, Thailand, 2007.
Detection of CT Markers Position and Orientation from CT-Scan Image for Navigation Dental Implant System Proceedings Article
In: Proceedings of the 3rd WACBE World Congress on Bioengineering 2007, Bangkok, Thailand, 2007.

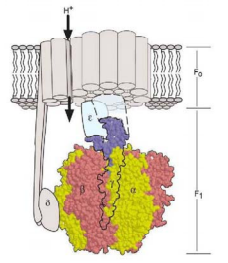
An Inverse Kinematics System for F1ATPase Nano-Motor Manipulation Proceedings Article
In: Proceedings of the 3rd WACBE World Congress on Bioengineering 2007, Bangkok, Thailand, 2007.
2006
A New Algorithm for Recovering Distal Hole Pose in Intramedullary Nail Proceedings Article
In: Proceedings of the 5th World Congress on Biomechanics, Munich, Germany, 2006.
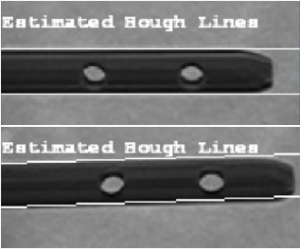
Intramedullary Nail Distal Hole Axis Estimation using Blob Analysis and Hough Transform Proceedings Article
In: 2006 IEEE Conference on Robotics, Automation and Mechatronics, pp. 1-6, 2006, ISSN: 2158-219X.
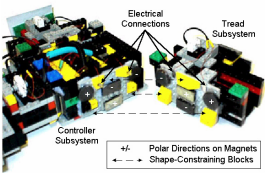
Toward Self-Replication of Robot Control Circuitry by Self-Inspection Proceedings Article
In: Ang, Marcelo H.; Khatib, Oussama (Ed.): Experimental Robotics IX, pp. 303–309, Springer Berlin Heidelberg, Berlin, Heidelberg, 2006, ISBN: 978-3-540-33014-1.
An Implementation on Recovery of IMN Distal Holes Orientation Proceedings Article
In: Proceedings of the 2nd International Symposium on Biomedical Engineering Conference in 2006 (ISBME 2006), Bangkok, Thailand, 2006.
2005
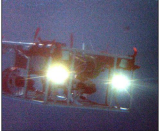
Development of the `ThaiXPole' Underwater Robot for the Antarctica Exploration Proceedings Article
In: Proceedings of OCEANS 2005 MTS/IEEE, pp. 1-6, Singapore, 2005, ISSN: 0197-7385.
Design and Construct of a New 3-D Binary Hyper-Redundant Robotic Manipulator, 'The MU-BHR Manipulator' Proceedings Article
In: Proceedings of the International Conference Emerging System and Technology, pp. 77–84, Seoul, South Korea, 2005.

2004
Robotics in Medical Applications Proceedings Article
In: Proceedings of the 1st International Symposium on Biomedical Engineering in 2004, Application of Biomedical Engineering in Dentistry and Medicine (ISBME 2004), pp. 93–96, Bangkok, Thailand, 2004.
Introduction to DNA Microarrays and The Pilot Study of an Active DNA Microarray Fabrication in Thailand Proceedings Article
In: Proceedings of the 2004 International Symposium on Biomedical Engineering 2004, Application of Biomedical Engineering in Dentistry and Medicine (ISBME 2004), pp. 23–26, Bangkok, Thailand, 2004.

Binary Hyper-Redundant Robotic Manipulator Concept Proceedings Article
In: 2004 IEEE Region 10 Conference TENCON 2004., pp. 625-628, Chiang Mai, Thailand, 2004.

A Novel Surgical Guidance System Utilizing Hybrid Fluoro-Stereoscope Navigation For an Orthopedic Surgery Proceedings Article
In: Proceedings of the 8th International Research/Expert Conference "Trends in the Development of Machinery and Associated Technology" (TMT 2004), Neum, Bosnia and Herzegovina, 2004.
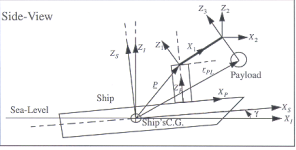
Anti-Swing Control of Suspended Loads on Shipboard Robotic Cranes Proceedings Article
In: Proceedings of the 2004 World-Multi Conferences on Systematics, Cybernatics, and Informatics, Florida, USA, 2004.
2003
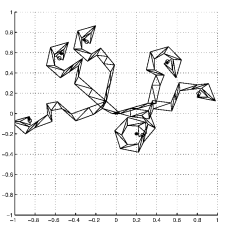
An Inverse Kinematics Algorithm for Discretely Actuated Hyper-Redundant Robotic Manipulators Proceedings Article
In: Proceedings of the 4th International Conference on Intelligence Technology in 2003 (InTech’03), Chiang Mai, Thailand, 2003.
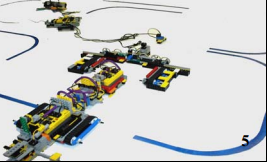
An Autonomous Self-Replicating Robotic System Proceedings Article
In: Proceedings 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), pp. 137-142, 2003.
A Semi-Autonomous Replicating Robotic System Proceedings Article
In: Proceedings 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation. Computational Intelligence in Robotics and Automation for the New Millennium (Cat. No.03EX694), pp. 776-781 vol.2, Kobe, Japan, 2003.
2002
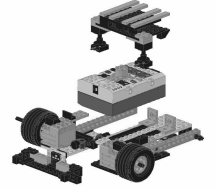
Toward Self-replicating Robots Proceedings Article
In: Siciliano, Bruno; Dario, Paolo (Ed.): Proceedings of the 8th International Symposium on Experimental Robotics (ISER 2002), pp. 392–401, Springer Berlin Heidelberg, Italy, 2002, ISBN: 978-3-540-36268-5.
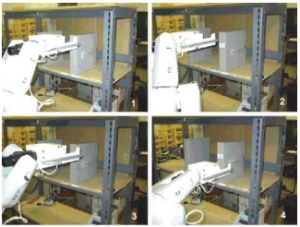
A Robotic Library System for an Off-Site Shelving Facility Proceedings Article
In: Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), pp. 3589-3594 vol.4, Mt. Fuji-Lake Yamanaka, Japan, 2002.
A Robotic Library System for an Off-Site Shelving Facility Proceedings Article
In: Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), pp. 3589-3594 vol.4, 2002.
Self-Replicating Robots for Space Utilization Proceedings Article
In: Proceedings of the 2002 RoboSphere: Self-Sustained System, NASA Ames Research Center, California, USA, 2002.

2000
Design and Implementation of a New Discretely-Actuated Manipulator Proceedings Article
In: Rus, Daniela; Singh, Sanjiv (Ed.): Proceedings of the 7th International Symposium on Experimental Robotics in 2000 (ISER 2000), pp. 151–157, Springer Berlin Heidelberg, Hawaii, USA, 2000, ISBN: 978-3-540-45118-1.