2024
Localization of the Upper Extremity Area on the Primary Motor Cortex with Transcranial Magnetic Stimulation Figure-of-Eight Coil: A Clinical Study Proceedings Article
In: 2024 17th International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), pp. 1–6, IEEE 2024.

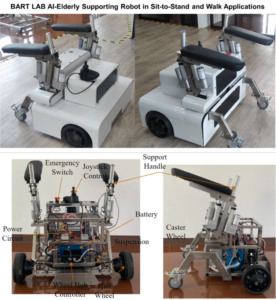
BART LAB AI Elderly Support Robot for Enhanced Biomechanical Assistance in Sit-to-Stand and Walking Activities Proceedings Article
In: 2024 17th International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), pp. 1–6, IEEE 2024.
Advancing Mobility in Stair Climbing with BART LAB's Intelligent Wheelchair: A Deep Learning Approach to Pose Estimation Proceedings Article
In: 2024 17th International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), pp. 1–6, IEEE 2024.

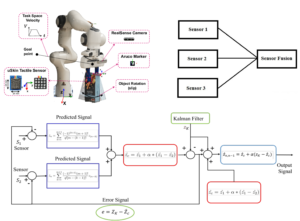
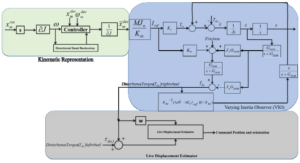
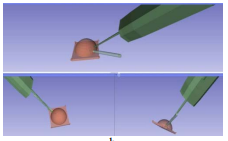
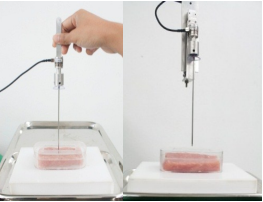
Hybrid Image-Based Motion Tracking and Adaptive Polynomial Kalman Filter for a Bio-Inspired Dual-Sheath Needle System Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1–7, IEEE 2024.
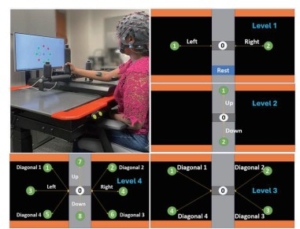
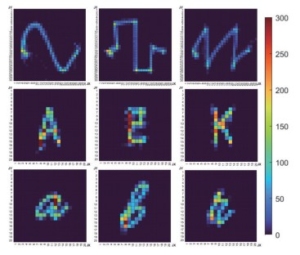
A Hybrid EEG-EMG Framework for Humanoid Control using Deep Learning Transformers Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 899–904, IEEE 2024.
Enhancing Post-Stroke Upper Limb Rehabilitation Through Haptic Feedback in Virtual Reality-Based Gaming Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 135–140, IEEE 2024.
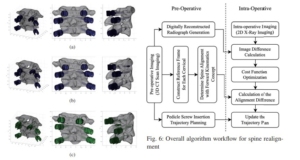
Intra-Operative Trajectory Realignment Algorithm for Minimizing Pedicle Screw Misplacement in Cervical Spinal Fusion Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1–6, IEEE 2024.
2023
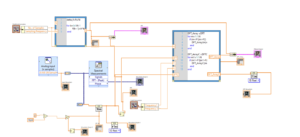
Adaptive Polynomial Predictive Filter: Solving Inconsistent and Interrupted Sensor Data Challenges Proceedings Article
In: 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1-6, 2023.
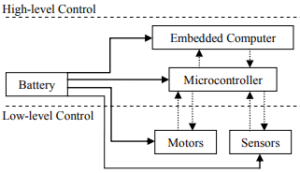
Bio-Signal Activated FPGA-Based System for Robotic-Assisted Rehabilitation Proceedings Article
In: 2023 3rd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), pp. 195–199, IEEE 2023.
2022
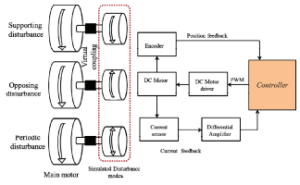
Sensorless Based Gravity Torque Estimation and Friction Compensation for Surgical Robotic System Conference
IECON 2022 / ICELIE 2022 48th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Brussels, Belgium, 2022.
Energy Optimized Path Planning and Decision Making for Multiple Robots in Rescue Operations Conference
IECON 2022 / ICELIE 2022 48th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Brussels, Belgium, 2022.

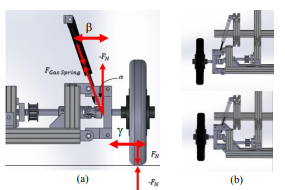
Energy Storage and Reversible Mechanisms for Lower Limb Exoskeleton Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

Teleoperative Pedicle Screw Insertion Guiding System for Spinal Fixation Operations Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.
Saliva Sample-Based BARTLAB-MPH Robotic Testing System for COVID-19 Detection Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

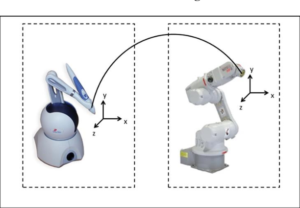
Development of Teleoperative System for Ultrasonography Collaborative Robots Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

2022 15th IEEE International Conference on Human System Interaction, IEEE, Melbourne, Australia, 2022.

Energy Optimized Path Planning and Decision Making for Multiple Robots in Rescue Operations Conference
The International Society of Artificial Life and Robotics Conference: (AROB-ISBC-SWARM 2022), IEEE, Beppu, Japan, 2022.
Stereo Vision-based Object Detection and Depth Estimation from 3D Reconstructed Scene for an Autonomous Multi Robotic Rescue Mission Proceedings Article
In: The International Society of Artificial Life and Robotics Conference: (AROB-ISBC-SWARM 2022), pp. 1643-1647, Beppu, Japan, 2022.
2021
Live Displacement Estimation for Rough Terrain Mobile Robot: BART LAB Rescue Robot Proceedings Article
In: Proceedings of the IEEE International Siberian Conference on Control and Communications (SIBCON-2021), pp. 1-6, IEEE, Kazan, Russia, 2021.
2020
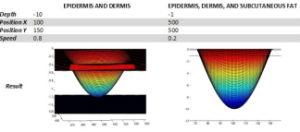
Constructing a Heterogeneous Model for Soft Tissue Deformation Using Two Dimensional Wave Equations Proceedings Article
In: Proceedings of the IEEE International Symposium on Medical Robotics (ISMR-2020), pp. 118-124, IEEE, Georgia Institute of Technology, USA, 2020.
2018
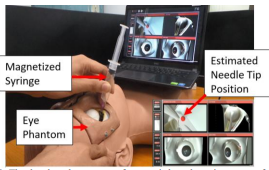
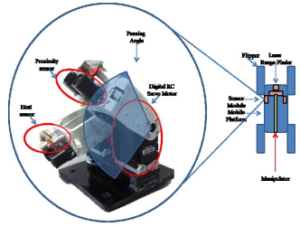
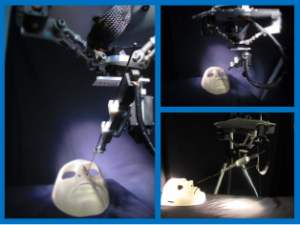
Hall Effect Sensing Workspace Estimation with Non-Permanent Magnetic Needle for Eye Anesthesia Training System via Robotic Experiments Proceedings Article
In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2018), pp. 4019-4024, IEEE, Brisbane, Australia, 2018.
2017
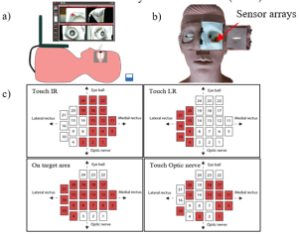
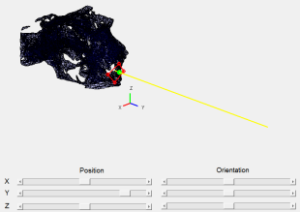
The Development of Active Magnetic Field Based Tracking System for Eye Anesthesia Training System Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.
Design and Development of Six-Position Feet Template for Peripheral Neuropathy Diabetes Testing Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.

A Study on Using A Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Monitoring Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.

Conceptual Design of the 2nd Iteration of BART LAB LL-EXO Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.
Virtual 3D Array for Bilaterally Controlled Surgical Robot Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.

Endoscopic Transsphenoidal Surgical Robot with Optical Tracking Control Proceedings Article
In: Proceedings of the 10th Hamlyn Symposium on Medical Robotics, The Hamlyn Centre, Faculty of Engineering, Imperial College London, Imperial College, London, UK, 2017.
2016
Battery Management for Rescue Robot Operation Proceedings Article
In: Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO 2016), IEEE, Qingdao, China, 2016.
Development of Differential Suspension Wheeled System for Telepresence Robot in Rural Hospital Area Proceedings Article
In: 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1046-1051, IEEE, Qingdao, China, 2016.
A Study on Risk Assessment for Improving Reliability of Rescue Robots Proceedings Article
In: Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO 2016), pp. 667-672, IEEE, Qingdao, China, 2016.

Needle Tip Position Tracking for Eye Anesthesia Practical Simulator Based on Hall-Effect Array Sensor Proceedings Article
In: Proceeding of the 20th Annual Conference of the International Society for Computer Aided Surgery (CARS 2016), Heidelberg, Germany, 2016.

Enforced Acceleration Control for DC Actuated Rescue Robot Proceedings Article
In: 2016 XXII International Conference on Electrical Machines (ICEM), pp. 2640-2648, 2016.
2015
Wave Equation Model of Soft Tissue for a Virtual Reality Laparoscopy Training System - A Validation Study Proceedings Article
In: Proceedings of the 6th International Conference on Bioinformatics, Methods, and Algorithms (BIOINFORMATICS 2015), in conjunction with the 8th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2015), pp. 65–74, SCITEPRESS - Science and and Technology Publications, Lisbon, Portugal, 2015.

2014
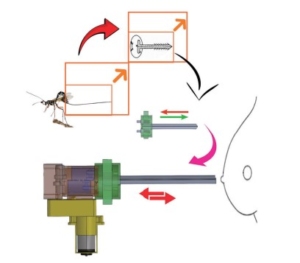
Toward Biomimic Breast Deformable Model for Robotic Breast Biopsy Navigation Development Proceedings Article
In: Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 595-600, IEEE, Bali, Indonesia, 2014.

A Path Generation Algorithm for Biopsy Needle Insertion in a Robotic Breast Biopsy Navigation System Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 398-403, 2014.
Effective Vital Sign Sensing Algorithm and System for Autonomous Survivor Detection in Rough-Terrain Autonomous Rescue Robots Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 831-836, 2014.
Workspace Determination and Robot Design of a Prototyped Surgical Robotic System Based on a Cadaveric Study in Endonasal Transsphenoidal Surgery Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 241-246, 2014.
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 47-52, 2014.
A Study and Development on Robotic Drug Storaging and Dispensing System in Drug Logistics for a Mid-Sized Hospital Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 2116-2120, 2014.

On the Design of a Biopsy Needle-Holding Robot for a Novel Breast Biopsy Robotic Navigation System Proceedings Article
In: The 4th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent, pp. 480-484, 2014.
On the Design and Development of a Breast Biopsy Navigation System: Path Generation Algorithm and System with its GUI Evaluation Proceedings Article
In: IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), pp. 273-276, 2014.

2013
3D Navigation for Transsphenoidal Surgical Robotics System Based on CT — Images and Basic Geometric Approach Proceedings Article
In: 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2007-2012, 2013.
Development of Veress Needle Insertion Robotic System and its Experimental Study for Force Acquisition in Soft Tissue Proceedings Article
In: 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 645-650, 2013.
LCP MEMS Implantable Pressure Sensor for Intracranial Pressure Measurement Proceedings Article
In: The 7th IEEE International Conference on Nano/Molecular Medicine and Engineering, pp. 63-67, 2013.

2012
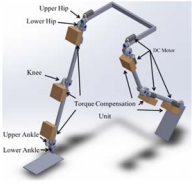
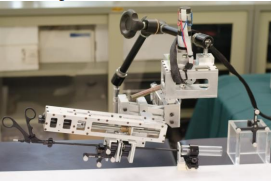
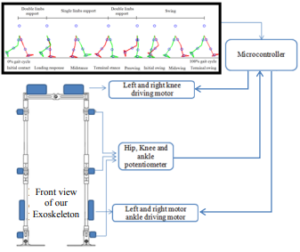
Design and Implementation of a New Motorized-Mechanical Exoskeleton Based on CGA Patternized Control Proceedings Article
In: 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1668-1673, 2012.
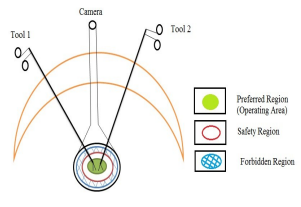
Euclidean Distance and Workspace Region Based Control Algorithm for Collision Avoidance in a Laparoscopic Surgical Robot: MU-LapaRobot Proceedings Article
In: 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2056-2061, 2012.
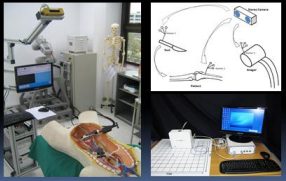
A Concept on Cooperative Tele-Surgical System Based on Image-Guiding and Robotic Technology Proceedings Article
In: 2012 Pan American Health Care Exchanges, pp. 41-45, 2012.
2011
The RoboCupRescue Robot League: Guiding Robots Towards Fieldable Capabilities Proceedings Article
In: Proceedings of the IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO) 2011, pp. 31–34, Half-Moon Bay, CA, USA, 2011.