2025
Sivaraman, Dileep; Ongwattanakul, Songpol; Moonjaita, Choladawan; Suthakorn, Jackrit; Pillai, Branesh M
A pack hunting strategy for heterogeneous robots in rescue operations Journal Article
In: Bioinspiration & Biomimetics, vol. 20, no. 1, pp. 016029, 2025.
BibTeX | Tags:
@article{sivaraman2025pack,
title = {A pack hunting strategy for heterogeneous robots in rescue operations},
author = {Dileep Sivaraman and Songpol Ongwattanakul and Choladawan Moonjaita and Jackrit Suthakorn and Branesh M Pillai},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Bioinspiration & Biomimetics},
volume = {20},
number = {1},
pages = {016029},
publisher = {IOP Publishing},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2024
Nakdhamabhorn, Sakol; Pillai, Branesh M; Chotivichit, Areesak; Suthakorn, Jackrit
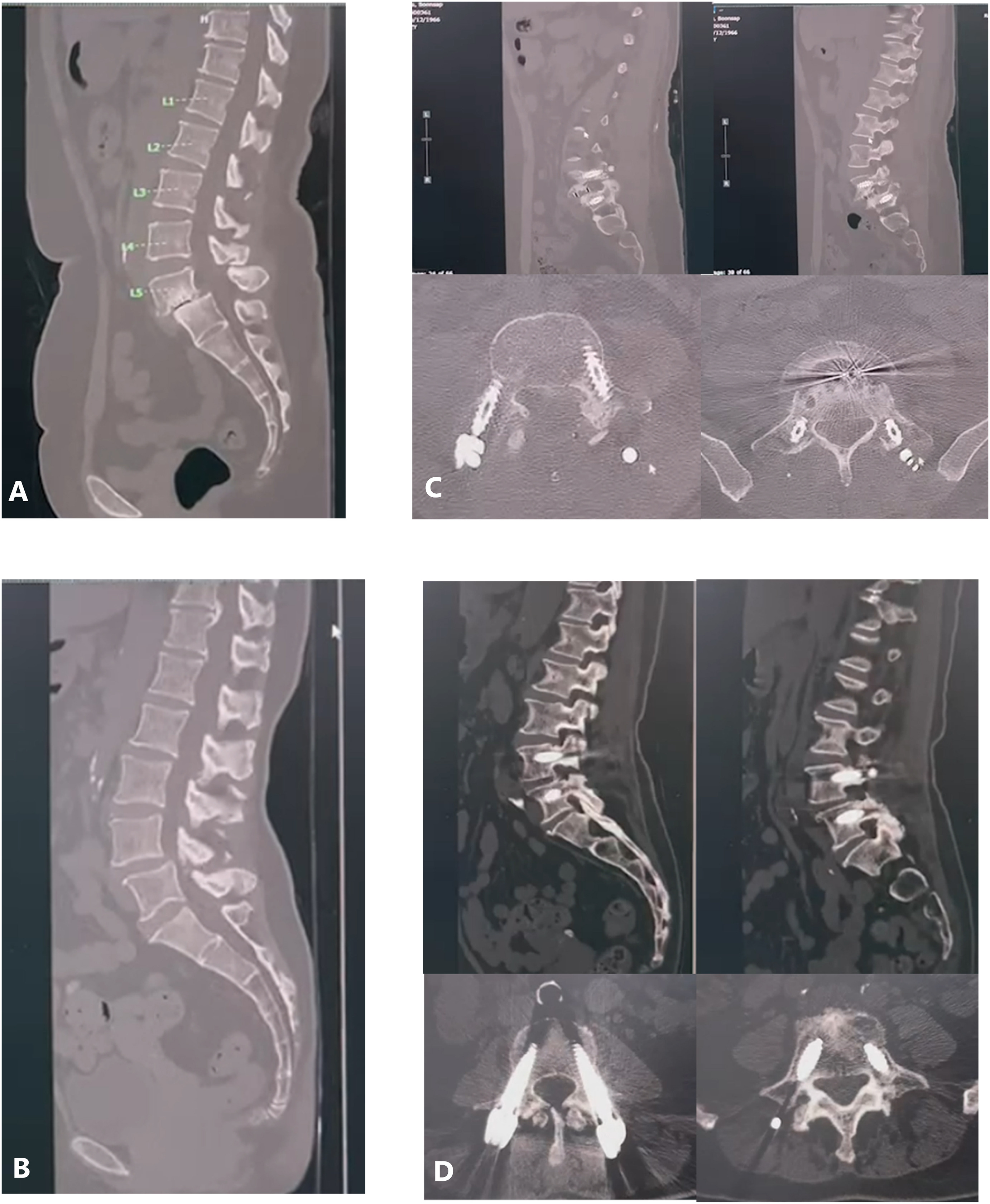
Sensorless based Haptic Feedback Integration in Robot-Assisted Pedicle Screw Insertion for Lumbar Spine Surgery: A Preliminary Cadaveric Study Journal Article
In: Computational and Structural Biotechnology Journal, vol. 24, pp. 420-433, 2024.
@article{nakdhamabhorn2024sensorless,
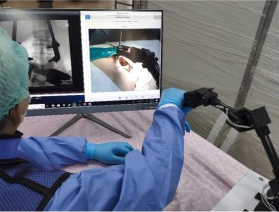
title = {Sensorless based Haptic Feedback Integration in Robot-Assisted Pedicle Screw Insertion for Lumbar Spine Surgery: A Preliminary Cadaveric Study},
author = {Sakol Nakdhamabhorn and Branesh M Pillai and Areesak Chotivichit and Jackrit Suthakorn},
url = {https://www.csbj.org/article/S2001-0370(24)00168-5/fulltext
https://bartlab.org/newweb/wp-content/uploads/2024/05/PIIS2001037024001685.pdf},
doi = {https://doi.org/10.1016/j.csbj.2024.05.022},
year = {2024},
date = {2024-12-01},
urldate = {2024-12-01},
journal = {Computational and Structural Biotechnology Journal},
volume = {24},
pages = {420-433},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Thuangtong, Rattapon; Suthakorn, Jackrit
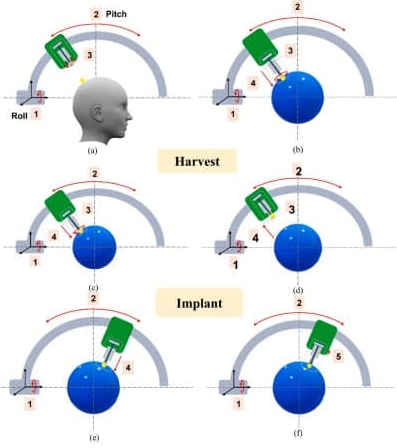
Design, Proof-of-Concept of Single Robotic Hair Transplant Mechanisms for Both Harvest and Implant of Hair Grafts Journal Article
In: Computational and Structural Biotechnology Journal, vol. 24, pp. 31-45, 2024, ISSN: 2001-0370.
Abstract | Links | BibTeX | Tags: Follicular unit extraction, Hair graft detection test, Robot vision test, Robotic surgery, Single robotic hair transplant system
@article{THUANGTONG202431,
title = {Design, Proof-of-Concept of Single Robotic Hair Transplant Mechanisms for Both Harvest and Implant of Hair Grafts},
author = {Rattapon Thuangtong and Jackrit Suthakorn},
url = {https://www.sciencedirect.com/science/article/pii/S200103702300466X},
doi = {https://doi.org/10.1016/j.csbj.2023.11.051},
issn = {2001-0370},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Computational and Structural Biotechnology Journal},
volume = {24},
pages = {31-45},
abstract = {The design and development of a prototype for a singular robotic hair transplant system capable of harvesting and implanting hair grafts were executed in this study. To establish a proof-of-concept for hair transplant procedures involving harvesting and implantation, a test system using a spherical phantom of the scalp was selected. The developed prototype of the robotic hair transplant system demonstrates the potential to reduce the duration that grafts remain without a blood supply, thereby minimizing hair graft damage. Additionally, the overall operation time for follicular unit extraction is comparatively shorter than that of conventional systems. Results from the robot vision tests indicate an 89.6% accuracy for hair graft detection with a 4 mm hair length phantom and 97.4% for a 2 mm hair length phantom. In the robot position control test, the root mean square error was found to be 1.268°, with a standard error of the mean of 0.203°. These outcomes suggest that the proposed system performs effectively under the conditions of a spherical phantom with a 2 mm hair length and a 5 mm distance between harvests.},
keywords = {Follicular unit extraction, Hair graft detection test, Robot vision test, Robotic surgery, Single robotic hair transplant system},
pubstate = {published},
tppubtype = {article}
}
Sivaraman, Dileep; Suthakorn, Jackrit; Pillai, Branesh M.; Magid, Evgeni
In: Advanced Robotics, vol. 0, no. 0, pp. 1-23, 2024.
Abstract | Links | BibTeX | Tags:
@article{doi:10.1080/01691864.2024.2309622,
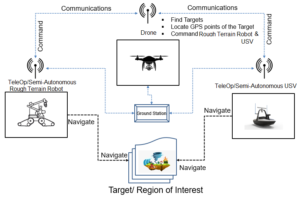
title = {A heterogeneous robots collaboration for safety, security, and rescue robotics: e-ASIA joint research program for disaster risk and reduction management},
author = {Dileep Sivaraman and Jackrit Suthakorn and Branesh M. Pillai and Evgeni Magid},
url = {https://doi.org/10.1080/01691864.2024.2309622
https://bartlab.org/newweb/wp-content/uploads/2024/02/A-heterogeneous-robots-collaboration-for-safety-security-and-rescue-robotics-e-ASIA-joint-research-program-for-disaster-risk-and-reduction-manageme.pdf},
doi = {10.1080/01691864.2024.2309622},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Advanced Robotics},
volume = {0},
number = {0},
pages = {1-23},
publisher = {Taylor & Francis},
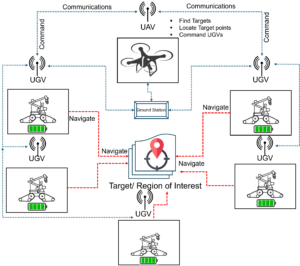
abstract = {In the face of humanitarian crises such as torrential rainfall, resulting floods, and landslides, rapid rescue operations are often imperative. However, owing to the inherent dangers and unpredictability of such circumstances, immediate on-site aid delivery is frequently unfeasible. In such challenging scenarios, mobile robot systems have emerged as the optimal solution for aiding search and rescue efforts. The 'Informational system for management of flood and landslide disaster areas using a distributed heterogeneous robotic team' project, initiated by the International e-ASIA Joint Research Program, united research teams from Japan, Russia, and Thailand, each contributing unique expertize and experience towards common objectives. Drawing upon our extensive theoretical and practical knowledge in disaster response research, we developed an integrated international operational framework for disaster site management, centered on dispersed, heterogeneous semi-autonomous Unmanned Aerial Vehicles (UAVs), Semi-Autonomous Rough Terrain Vehicles (UGVs), and Semi-Autonomous Surface Vehicles (USVs). This paper provides an overview of the methodologies, models, and algorithms employed throughout the successful three-year project conducted by the Thailand team while also directing interested readers to supplementary research papers for in-depth insights.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Sivaraman, Dileep; Ongwattanakul, Songpol; Pillai, Branesh M; Suthakorn, Jackrit
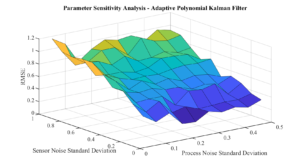
Adaptive polynomial Kalman filter for nonlinear state estimation in modified AR time series with fixed coefficients Journal Article
In: IET Control Theory & Applications, pp. 1806-1824, 2024.
Abstract | Links | BibTeX | Tags:
@article{sivaraman2024adaptive,
title = {Adaptive polynomial Kalman filter for nonlinear state estimation in modified AR time series with fixed coefficients},
author = {Dileep Sivaraman and Songpol Ongwattanakul and Branesh M Pillai and Jackrit Suthakorn},
doi = {DOI: 10.1049/cth2.12727},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {IET Control Theory & Applications},
pages = {1806-1824},
publisher = {Wiley Online Library},
abstract = {This article presents a novel approach for adaptive nonlinear state estimation in a modified autoregressive time series with fixed coefficients, leveraging an adaptive polynomial Kalman filter (APKF). The proposed APKF dynamically adjusts the evolving system dynamics by selecting an appropriate autoregressive time-series model corresponding to the optimal polynomial order, based on the minimum residual error. This dynamic selection enhances the robustness of the state estimation process, ensuring accurate predictions, even in the presence of varying system complexities and noise. The proposed methodology involves predicting the next state using polynomial extrapolation. Extensive simulations were conducted to validate the performance of the APKF, demonstrating its superiority in accurately estimating the true system state compared with traditional Kalman filtering methods. The root-mean-square error was evaluated for various combinations of standard deviations of sensor noise and process noise for different sample sizes. On average, the root-mean-square error value, which represents the disparity between the true sensor reading and estimate derived from the adaptive Kalman filter, was 35.31% more accurate than that of the traditional Kalman filter. The comparative analysis highlights the efficacy of the APKF, showing significant improvements in state estimation accuracy and noise resilience.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
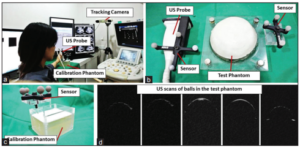
Suthakorn, Jackrit; Chatrasingh, Maria; Wiratkapun, Cholatip; Ongwattanakul, Songpol
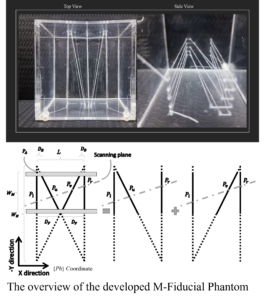
M-Fiducial Phantom Based Fast Automatic Ultrasound Calibration Technique: A Novel Approach for 2D to 3D Image Registration Journal Article
In: Heliyon, 2024.
BibTeX | Tags:
@article{suthakorn2024m,
title = {M-Fiducial Phantom Based Fast Automatic Ultrasound Calibration Technique: A Novel Approach for 2D to 3D Image Registration},
author = {Jackrit Suthakorn and Maria Chatrasingh and Cholatip Wiratkapun and Songpol Ongwattanakul},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Heliyon},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Chumnanvej, Sorayouth; Pillai, Branesh M; Suthakorn, Jackrit; Chumnanvej, Siriluk
Revised in-depth meta-analysis on the efficacy of robot-assisted versus traditional free-hand pedicle screw insertion Journal Article
In: Laparoscopic, Endoscopic and Robotic Surgery, 2024.
BibTeX | Tags:
@article{chumnanvej2024revised,
title = {Revised in-depth meta-analysis on the efficacy of robot-assisted versus traditional free-hand pedicle screw insertion},
author = {Sorayouth Chumnanvej and Branesh M Pillai and Jackrit Suthakorn and Siriluk Chumnanvej},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Laparoscopic, Endoscopic and Robotic Surgery},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Sivaraman, Dileep; Pillai, Branesh M; Ongwattanakul, Songpol; Suthakorn, Jackrit
Adaptive polynomial predictive filter for sensor data estimation and prediction in interference environment Journal Article
In: IET Control Theory & Applications, 2024.
BibTeX | Tags:
@article{sivaraman2024adaptiveb,
title = {Adaptive polynomial predictive filter for sensor data estimation and prediction in interference environment},
author = {Dileep Sivaraman and Branesh M Pillai and Songpol Ongwattanakul and Jackrit Suthakorn},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {IET Control Theory & Applications},
publisher = {Wiley Online Library},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2023
Sivaraman, Dileep; Ongwattanakul, Songpol; Suthakorn, Jackrit; Pillai, Branesh M.
Nonlinear Dynamic States’ Estimation and Prediction Using Polynomial Predictive Modeling Journal Article
In: IEEE Canadian Journal of Electrical and Computer Engineering, vol. 46, no. 3, pp. 185-195, 2023.
@article{10146201,
title = {Nonlinear Dynamic States’ Estimation and Prediction Using Polynomial Predictive Modeling},
author = {Dileep Sivaraman and Songpol Ongwattanakul and Jackrit Suthakorn and Branesh M. Pillai},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/08/Nonlinear_Dynamic_States_Estimation_and_Prediction_Using_Polynomial_Predictive_Modeling.pdf},
doi = {10.1109/ICJECE.2023.3260830},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {IEEE Canadian Journal of Electrical and Computer Engineering},
volume = {46},
number = {3},
pages = {185-195},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Chatrasingh, Maria; Wiratkapun, Cholatip; Suthakorn, Jackrit
A Generalized Closed-Form Solution for 3D Registration of Two-Point Sets under Isotropic and Anisotropic Scaling Journal Article
In: Results in Physics, vol. 51, pp. 106746, 2023, ISSN: 2211-3797.
Abstract | Links | BibTeX | Tags: 3D registration, Anisotropic Scaling, Non-uniform scaling, Point set registration, Ultrasound images
@article{CHATRASINGH2023106746,
title = {A Generalized Closed-Form Solution for 3D Registration of Two-Point Sets under Isotropic and Anisotropic Scaling},
author = {Maria Chatrasingh and Cholatip Wiratkapun and Jackrit Suthakorn},
url = {https://www.sciencedirect.com/science/article/pii/S2211379723005399
http://bartlab.org/newweb/wp-content/uploads/2023/08/1-s2.0-S2211379723005399-main.pdf},
doi = {https://doi.org/10.1016/j.rinp.2023.106746},
issn = {2211-3797},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Results in Physics},
volume = {51},
pages = {106746},
abstract = {Fitting of two-point sets under non-uniform scaling involves several applications, including ultrasound-guided surgery, where ultrasound images generally show anisotropy between its lateral and depth resolution. However, the current state-of-the-art only accomplishes the closed-form solution under the assumption of isotropic scaling, and only the iterative form of the solution is available for registration regardless of scaling type. A generalized closed-form solution, including anisotropic scaling, could robust the computation in the applications of multi-modality image fusion and surgical navigation based on ultrasound images. In this paper, a generalized closed-form solution (GCFS) that accounts for isotropic scaling and anisotropic scaling is proposed. GCFS finds the least-squares solution of rotation, translation, and scaling based on the singular value decomposition (SVD). The method was demonstrated to 1) register two 3D point sets under the effect of anisotropic scaling and 2) register two coplanar 3D point sets under the effect of anisotropic scaling. This study evaluates 3D registration between the preoperative model and intraoperative ultrasonic scanning of a femur and 2D registration of ultrasound images to the phantom for ultrasound calibration. In addition, the conditions that affect the transformation estimations like estimating reflection and noise degeneracy were also considered in the evaluation.},
keywords = {3D registration, Anisotropic Scaling, Non-uniform scaling, Point set registration, Ultrasound images},
pubstate = {published},
tppubtype = {article}
}

Pillai, Branesh M.; Owatchaiyapong, Peerapat; Treratanakulchai, Shen; Sivaraman, Dileep; Ongwattanakul, Songpol; Suthakorn, Jackrit
Lower Limb Exoskeleton with Energy-Storing Mechanism for Spinal Cord Injury Rehabilitation Journal Article
In: IEEE Access, vol. 11, pp. 133850-133866, 2023.
@article{10328556,
title = {Lower Limb Exoskeleton with Energy-Storing Mechanism for Spinal Cord Injury Rehabilitation},
author = {Branesh M. Pillai and Peerapat Owatchaiyapong and Shen Treratanakulchai and Dileep Sivaraman and Songpol Ongwattanakul and Jackrit Suthakorn},
doi = {10.1109/ACCESS.2023.3336308},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {IEEE Access},
volume = {11},
pages = {133850-133866},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Chumnanvej, Sorayouth; Ariyaprakai, Krish; Pillai, Branesh M; Suthakorn, Jackrit; Gurusamy, Sharvesh; Chumnanvej, Siriluk
Cost-effectiveness of robotic-assisted spinal surgery: a single-center retrospective study Journal Article
In: Laparoscopic, Endoscopic and Robotic Surgery, vol. 6, no. 4, pp. 147–153, 2023.
BibTeX | Tags:
@article{chumnanvej2023cost,
title = {Cost-effectiveness of robotic-assisted spinal surgery: a single-center retrospective study},
author = {Sorayouth Chumnanvej and Krish Ariyaprakai and Branesh M Pillai and Jackrit Suthakorn and Sharvesh Gurusamy and Siriluk Chumnanvej},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Laparoscopic, Endoscopic and Robotic Surgery},
volume = {6},
number = {4},
pages = {147–153},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2022
Forouhar, Danial; Suthakorn, Jackrit
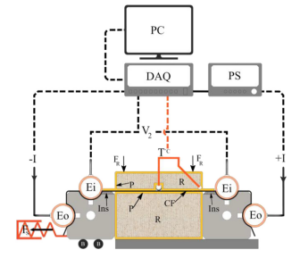
Concurrent Function of High-Strength Dry Carbon Fiber as Resistive Heating Element and Thermistor in Ambient air Journal Article
In: Heliyon, vol. 8, no. 12, pp. e12051, 2022, ISSN: 2405-8440.
Links | BibTeX | Tags: Multidisciplinary
@article{Forouhar2022b,
title = {Concurrent Function of High-Strength Dry Carbon Fiber as Resistive Heating Element and Thermistor in Ambient air},
author = {Danial Forouhar and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J1.pdf},
doi = {10.1016/j.heliyon.2022.e12051},
issn = {2405-8440},
year = {2022},
date = {2022-12-00},
urldate = {2022-12-00},
journal = {Heliyon},
volume = {8},
number = {12},
pages = {e12051},
publisher = {Elsevier BV},
keywords = {Multidisciplinary},
pubstate = {published},
tppubtype = {article}
}
Bohara, Smriti; Suthakorn, Jackrit
Surface Coating of Orthopedic Implant to Enhance the Osseointegration and Reduction of Bacterial Colonization: A Review Journal Article
In: Biomaterials Research, vol. 26, no. 1, pp. 1–17, 2022, ISSN: 2055-7124.
Abstract | Links | BibTeX | Tags: Biomaterials, Biomedical Engineering, Ceramics and Composites, Medicine (miscellaneous)
@article{Bohara2022,
title = {Surface Coating of Orthopedic Implant to Enhance the Osseointegration and Reduction of Bacterial Colonization: A Review},
author = {Smriti Bohara and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/3J.pdf},
doi = {10.1186/s40824-022-00269-3},
issn = {2055-7124},
year = {2022},
date = {2022-12-00},
urldate = {2022-12-00},
journal = {Biomaterials Research},
volume = {26},
number = {1},
pages = {1--17},
publisher = {Springer Science and Business Media LLC},
abstract = {The use of orthopedic implants in surgical technology has fostered restoration of physiological functions. Along with successful treatment, orthopedic implants suffer from various complications and fail to offer functions correspondent to native physiology. The major problems include aseptic and septic loosening due to bone nonunion and implant site infection due to bacterial colonization. Crucial advances in material selection in the design and development of coating matrixes an opportunity for the prevention of implant failure. However, many coating materials are limited in <jats:italic>in-vitro</jats:italic> testing and few of them thrive in clinical tests. The rate of implant failure has surged with the increasing rates of revision surgery creating physical and sensitive discomfort as well as economic burdens. To overcome critical pathogenic activities several systematic coating techniques have been developed offering excellent results that combat infection and enhance bone integration. This review article includes some more common implant coating matrixes with excellent in vitro and in vivo results focusing on infection rates, causes, complications, coating materials, host immune responses and significant research gaps. This study provides a comprehensive overview of potential coating technology, with functional combination coatings which are focused on ultimate clinical practice with substantial improvement on in-vivo tests. This includes the development of rapidly growing hydrogel coating techniques with the potential to generate several accurate and precise coating procedures.},
keywords = {Biomaterials, Biomedical Engineering, Ceramics and Composites, Medicine (miscellaneous)},
pubstate = {published},
tppubtype = {article}
}

Sharma, Bibhu; Pillai, Branesh M.; Suthakorn, Jackrit
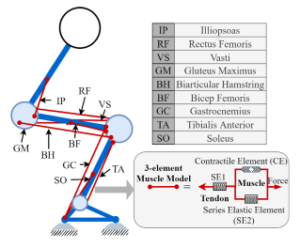
Biomechanical Trajectory Optimization of Human Sit-to-Stand Motion with Stochastic Motion Planning Framework Journal Article
In: IEEE Transactions on Medical Robotics and Bionics, vol. 4, no. 4, pp. 1022–1033, 2022, ISSN: 2576-3202.
Links | BibTeX | Tags: Artificial Intelligence, Biomedical Engineering, Computer Science Applications, Control and Optimization, Human-Computer Interaction
@article{Sharma2022,
title = {Biomechanical Trajectory Optimization of Human Sit-to-Stand Motion with Stochastic Motion Planning Framework},
author = {Bibhu Sharma and Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J2.pdf},
doi = {10.1109/tmrb.2022.3205509},
issn = {2576-3202},
year = {2022},
date = {2022-11-00},
urldate = {2022-11-00},
journal = { IEEE Transactions on Medical Robotics and Bionics},
volume = {4},
number = {4},
pages = {1022--1033},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {Artificial Intelligence, Biomedical Engineering, Computer Science Applications, Control and Optimization, Human-Computer Interaction},
pubstate = {published},
tppubtype = {article}
}
Nillahoot, Nantida; Pillai, Branesh M.; Sharma, Bibhu; Wilasrusmee, Chumpon; Suthakorn, Jackrit
In: Sensors, vol. 22, no. 22, 2022, ISSN: 1424-8220.
Abstract | Links | BibTeX | Tags: Analytical Chemistry, and Optics, Atomic and Molecular Physics, Biochemistry, Electrical and Electronic Engineering, Instrumentation
@article{Nillahoot2022,
title = {Interactive 3D Force/Torque Parameter Acquisition and Correlation Identification during Primary Trocar Insertion in Laparoscopic Abdominal Surgery: 5 Cases},
author = {Nantida Nillahoot and Branesh M. Pillai and Bibhu Sharma and Chumpon Wilasrusmee and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J3.pdf},
doi = {10.3390/s22228970},
issn = {1424-8220},
year = {2022},
date = {2022-11-00},
urldate = {2022-11-00},
journal = {Sensors},
volume = {22},
number = {22},
publisher = {MDPI AG},
abstract = {Laparoscopic procedures have become indispensable in gastrointestinal surgery. As a minimally invasive process, it begins with primary trocar insertion. However, this step poses the threat of injuries to the gastrointestinal tract and blood vessels. As such, the comprehension of the insertion process is crucial to the development of robotic-assisted/automated surgeries. To sustain robotic development, this research aims to study the interactive force/torque (F/T) behavior between the trocar and the abdomen during the trocar insertion process. For force/torque (F/T) data acquisition, a trocar interfaced with a six-axis F/T sensor was used by surgeons for the insertion. The study was conducted during five abdominal hernia surgical cases in the Department of Surgery, Faculty of Medicine, Ramathibodi Hospital, Mahidol University. The real-time F/T data were further processed and analyzed. The fluctuation in the force/torque (F/T) parameter was significant, with peak force ranging from 16.83 N to 61.86 N and peak torque ranging from 0.552 Nm to 1.76 Nm. The force parameter was observed to positively correlate with procedural time, while torque was found to be negatively correlated. Although during the process a surgeon applied force and torque in multiple axes, for a robotic system, the push and turn motion in a single axis was observed to be sufficient. For minimal tissue damage in less procedural time, a system with low push force and high torque was observed to be advantageous. These understandings will eventually benefit the development of computer-assisted or robotics technology to improve the outcome of the primary trocar insertion procedure.},
keywords = {Analytical Chemistry, and Optics, Atomic and Molecular Physics, Biochemistry, Electrical and Electronic Engineering, Instrumentation},
pubstate = {published},
tppubtype = {article}
}

Sharma, Bibhu; Pillai, Branesh M.; Borvorntanajanya, Korn; Suthakorn, Jackrit
Modeling and Design of a Stair Climbing Wheelchair with Pose Estimation and Adjustment Journal Article
In: J Intell Robot Syst, vol. 106, no. 3, 2022, ISSN: 1573-0409.
Links | BibTeX | Tags: Artificial Intelligence, Control and Systems Engineering, Electrical and Electronic Engineering, Industrial and Manufacturing Engineering, Mechanical Engineering, Software
@article{Sharma2022b,
title = {Modeling and Design of a Stair Climbing Wheelchair with Pose Estimation and Adjustment},
author = {Bibhu Sharma and Branesh M. Pillai and Korn Borvorntanajanya and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/J4.pdf},
doi = {10.1007/s10846-022-01765-3},
issn = {1573-0409},
year = {2022},
date = {2022-11-00},
urldate = {2022-11-00},
journal = {J Intell Robot Syst},
volume = {106},
number = {3},
publisher = {Springer Science and Business Media LLC},
keywords = {Artificial Intelligence, Control and Systems Engineering, Electrical and Electronic Engineering, Industrial and Manufacturing Engineering, Mechanical Engineering, Software},
pubstate = {published},
tppubtype = {article}
}

Borvorntanajanya, Korn; Suthakorn, Jackrit
The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System Journal Article
In: IEEE Access, vol. 10, pp. 99762–99775, 2022, ISSN: 2169-3536.
Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science, General Engineering, General Materials Science
@article{Borvorntanajanya2022,
title = {The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System},
author = {Korn Borvorntanajanya and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/2J.pdf},
doi = {10.1109/access.2022.3207179},
issn = {2169-3536},
year = {2022},
date = {2022-00-00},
urldate = {2022-00-00},
journal = {IEEE Access},
volume = {10},
pages = {99762--99775},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {Electrical and Electronic Engineering, General Computer Science, General Engineering, General Materials Science},
pubstate = {published},
tppubtype = {article}
}

2021
Bohara, Smriti; Rohner, Nathan; Budziszewski, Emily; Suthakorn, Jackrit; von Recum, Horst A.; Exner, Agata A.
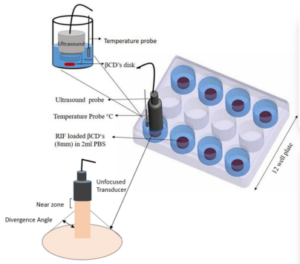
Ultrasound Triggered Drug Release from Affinity-Based β-Cyclodextrin Polymers for Infection Control Journal Article
In: Annals of Biomedical Engineering, vol. 49, no. 9, pp. 2513–2521, 2021, ISSN: 1573-9686.
Links | BibTeX | Tags: Biomedical Engineering
@article{Bohara2021,
title = {Ultrasound Triggered Drug Release from Affinity-Based β-Cyclodextrin Polymers for Infection Control},
author = {Smriti Bohara and Nathan Rohner and Emily Budziszewski and Jackrit Suthakorn and Horst A. von Recum and Agata A. Exner},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/1.pdf},
doi = {10.1007/s10439-021-02814-y},
issn = {1573-9686},
year = {2021},
date = {2021-09-00},
urldate = {2021-09-00},
journal = {Annals of Biomedical Engineering},
volume = {49},
number = {9},
pages = {2513--2521},
publisher = {Springer Science and Business Media LLC},
howpublished = {Epub ahead of print},
keywords = {Biomedical Engineering},
pubstate = {published},
tppubtype = {article}
}
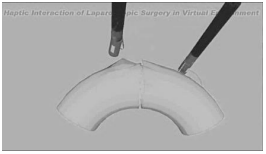
Nillahoot, Nantida; Patel, Sneha; Suthakorn, Jackrit
In: The Open Biomedical Engineering Journal (TOBEJ), vol. 15, no. 1, pp. 16–28, 2021, ISSN: 1874-1207.
Abstract | Links | BibTeX | Tags: Bioengineering, Biomedical Engineering, Medicine (miscellaneous)
@article{Nillahoot2021,
title = {A Technique for Mimicking Soft Tissue Manipulation from Experimental Data to a Wave Equation Model for a New Laparoscopic Virtual Reality Training System},
author = {Nantida Nillahoot and Sneha Patel and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/2.pdf},
doi = {10.2174/1874120702115010016},
issn = {1874-1207},
year = {2021},
date = {2021-06-22},
urldate = {2021-06-22},
journal = {The Open Biomedical Engineering Journal (TOBEJ)},
volume = {15},
number = {1},
pages = {16--28},
publisher = {Bentham Science Publishers Ltd.},
abstract = {Background: The difficulty of laparoscopic procedures and the specific psychomotor skills required support the need for a training system for intensive and repetitive practice to acquire the specific skills. The present VR training systems have some limitations with respect to the soft tissue models in the training system. This is associated with the need for a real-time simulation, which requires a balance between computational cost and accuracy.
Objective: The primary objective of the study is to develop a two dimensional wave equation model that closely mimics the soft tissue manipulation in a laparoscopic procedure for a VR training system.
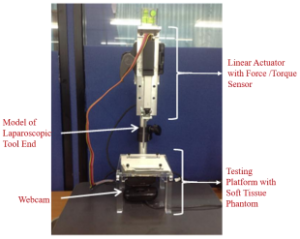
Methods: A novel mathematical model based on the wave equation is prepared to represent the interaction between the laparoscopic tool and the soft tissue. The parameters within the model are determined through experimental analysis of a soft tissue phantom. The experimental setup involves a linear actuator applying force to the soft tissue phantom to generate deformation. Data acquisition is conducted through a camera and a robotic force acquisition system which measures force, displacement of the linear actuator and records a video. Through image processing, the displacements of the markers on the phantom’s x-y plane during its deformation are determined and these parameters are used to develop the model, which finally is validated through a comparative analysis.
Results: The results from the developed model are observed and compared statistically as well as graphically with the finite element model based on deformation data. The results show that the deformation data between the developed model and the available model is significantly similar.
Conclusion: This study demonstrates the adaptability of the wave equation to meet the needs of the specific surgical procedure through modification of the model based on the experimental data. Moreover, the comparative analysis further corroborates the relevance and validity of the model for the surgical training system.},
keywords = {Bioengineering, Biomedical Engineering, Medicine (miscellaneous)},
pubstate = {published},
tppubtype = {article}
}
Objective: The primary objective of the study is to develop a two dimensional wave equation model that closely mimics the soft tissue manipulation in a laparoscopic procedure for a VR training system.
Methods: A novel mathematical model based on the wave equation is prepared to represent the interaction between the laparoscopic tool and the soft tissue. The parameters within the model are determined through experimental analysis of a soft tissue phantom. The experimental setup involves a linear actuator applying force to the soft tissue phantom to generate deformation. Data acquisition is conducted through a camera and a robotic force acquisition system which measures force, displacement of the linear actuator and records a video. Through image processing, the displacements of the markers on the phantom’s x-y plane during its deformation are determined and these parameters are used to develop the model, which finally is validated through a comparative analysis.
Results: The results from the developed model are observed and compared statistically as well as graphically with the finite element model based on deformation data. The results show that the deformation data between the developed model and the available model is significantly similar.
Conclusion: This study demonstrates the adaptability of the wave equation to meet the needs of the specific surgical procedure through modification of the model based on the experimental data. Moreover, the comparative analysis further corroborates the relevance and validity of the model for the surgical training system.
Nillahoot, Nantida; Pillai, Branesh M.; Chumnanvej, Sorayouth; Suthakorn, Jackrit
The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 3, pp. 1368–1379, 2021, ISSN: 2302-9285.
Abstract | Links | BibTeX | Tags: Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation
@article{Nillahoot2021b,
title = {The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery},
author = {Nantida Nillahoot and Branesh M. Pillai and Sorayouth Chumnanvej and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/07/3.pdf},
doi = {10.11591/eei.v10i3.3037},
issn = {2302-9285},
year = {2021},
date = {2021-06-01},
urldate = {2021-06-01},
journal = {Bulletin of Electrical Engineering and Informatics},
volume = {10},
number = {3},
pages = {1368--1379},
publisher = {Institute of Advanced Engineering and Science},
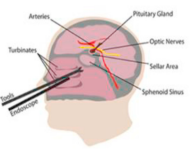
abstract = {Endoscopic endonasal transsphenoidal surgery (EETS) is a standard procedure to treat the pituitary adenoma, a tumor in the pituitary gland that causes malfunction of hormones. Although the method is substantially minimal invasive, the surgeon may encounter intricacies. The major challenges are narrow surgery pathway, limited working area, lack of case studies for practicing, steep learning curve owing to the intricate steps, and the tool insertion risk. To ease the neurosurgeons, this research focuses on the development and testing of the surgical simulator based on the pathway guidance and the interchangeable surgical instrument tooltip. The system was tested in human cadaver-based experiments with interchangeability in terms of function and the performance of the simulator in terms of the benefits. The experiments demonstrate the augmentation in the learning skill of the user through the simulator based on the completion time assessment and the error reduction. Furthermore, the satisfaction level of the interchangeable surgical tool, which was found using sliding switch and gripper scored 71.40%, the interchangeable tooltip function, which is a novel function to participants scored 85.6% and the practical use had 77%. The geometric aspect of the interchangeable tool scored lowest (62.80%) and was found to be moderate among the neurosurgeons.},
keywords = {Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation},
pubstate = {published},
tppubtype = {article}
}

Nakdhamabhorn, Sakol; Pillai, M. Branesh; Suthakorn, Jackrit
Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 2, pp. 619–631, 2021, ISSN: 2302-9285.
Abstract | Links | BibTeX | Tags: Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation
@article{Nakdhamabhorn2021,
title = {Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype},
author = {Sakol Nakdhamabhorn and M. Branesh Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/3_Journal_Publlished_Article.pdf},
doi = {10.11591/eei.v10i2.2331},
issn = {2302-9285},
year = {2021},
date = {2021-04-01},
urldate = {2021-04-01},
journal = {Bulletin of Electrical Engineering and Informatics},
volume = {10},
number = {2},
pages = {619--631},
publisher = {Institute of Advanced Engineering and Science},
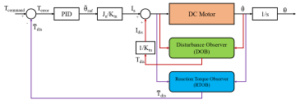
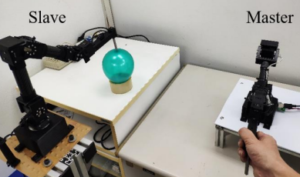
abstract = {Minimally invasive surgery (MIS) is one of the most challenging tasks in surgical procedures due to the lack of visibility of the surgical area, instrument orientation, and depth perception. A tele-operated robot assisted minimally invasive surgery is developed to enhance a surgeon's hand dexterity and accuracy. To perform MIS, the surgeon controls a slave manipulator via a master manipulator, so the force feedback and motion feedback are required to imitate an amount of action and reaction force between master and slave manipulator. The complicated MIS requires more complex surgical manipulator with multi DOFs and multiple force feedback. The limitation of multiple DOFs force feedback is a bandwidth of torque sensors. Therefore, this study proposes a sensorless based 5-DOF Bilaterally controlled surgical manipulation. In this research disturbance observer (DOB) is used to identify the internal disturbance of the system, which is used to estimate the reaction torque. This research mainly focuses on a 5-DOF bilaterally controlled surgical manipulator to maintain a position and additional force. The result of torque error in contact motion is less than 2%, the non-contact motion error is not over 5%, and it is evident that the error is always less than 0.3% for the position response.},
keywords = {Computer Networks and Communications, Computer Science (miscellaneous), Control and Optimization, Control and Systems Engineering, Electrical and Electronic Engineering, Hardware and Architecture, Information Systems, Instrumentation},
pubstate = {published},
tppubtype = {article}
}
Chumnanvej, Sorayouth; Pillai, Branesh M.; Chalongwongse, Suwiphat; Suthakorn, Jackrit
Endonasal Endoscopic Transsphenoidal Approach Robot Prototype: A Cadaveric Trial Journal Article
In: Asian Journal of Surgery, vol. 44, no. 1, pp. 345–351, 2021, ISSN: 1015-9584.
Links | BibTeX | Tags: Surgery
@article{Chumnanvej2021,
title = {Endonasal Endoscopic Transsphenoidal Approach Robot Prototype: A Cadaveric Trial},
author = {Sorayouth Chumnanvej and Branesh M. Pillai and Suwiphat Chalongwongse and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/5_Journal_Published_Article.pdf},
doi = {10.1016/j.asjsur.2020.08.011},
issn = {1015-9584},
year = {2021},
date = {2021-01-00},
urldate = {2021-01-00},
journal = {Asian Journal of Surgery},
volume = {44},
number = {1},
pages = {345--351},
publisher = {Elsevier BV},
keywords = {Surgery},
pubstate = {published},
tppubtype = {article}
}
Kishore, Mayur; Sharma, Bibhu; Pillai, Branesh M.; Suthakorn, Jackrit
Model Predictive Control-Based Thermoelectric Cooling for Rough Terrain Rescue Robots Journal Article
In: IEEE Access, vol. 9, pp. 167652–167662, 2021, ISSN: 2169-3536.
Links | BibTeX | Tags: General Computer Science, General Engineering, General Materials Science
@article{Kishore2021,
title = {Model Predictive Control-Based Thermoelectric Cooling for Rough Terrain Rescue Robots},
author = {Mayur Kishore and Bibhu Sharma and Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/4J.pdf},
doi = {10.1109/access.2021.3136174},
issn = {2169-3536},
year = {2021},
date = {2021-00-00},
urldate = {2021-00-00},
journal = {IEEE Access},
volume = {9},
pages = {167652--167662},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {General Computer Science, General Engineering, General Materials Science},
pubstate = {published},
tppubtype = {article}
}
2020
Direkwatana, Chawaphol; Suthakorn, Jackrit; Wilasrussamee, Chumpon
MU-LapaRobot: A Corporative Surgical Robot for Laparoscopic Surgery Journal Article
In: The Open Biomedical Engineering Journal (TOBEJ), vol. 14, no. 1, pp. 43–54, 2020, ISSN: 1874-1207.
Abstract | Links | BibTeX | Tags: Bioengineering, Biomedical Engineering, Medicine (miscellaneous)
@article{Direkwatana2020,
title = {MU-LapaRobot: A Corporative Surgical Robot for Laparoscopic Surgery},
author = {Chawaphol Direkwatana and Jackrit Suthakorn and Chumpon Wilasrussamee},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/4_Journal_Published_Article.pdf},
doi = {10.2174/1874120702014010043},
issn = {1874-1207},
year = {2020},
date = {2020-10-26},
urldate = {2020-10-26},
journal = {The Open Biomedical Engineering Journal (TOBEJ)},
volume = {14},
number = {1},
pages = {43--54},
publisher = {Bentham Science Publishers Ltd.},
abstract = {Objective: Development of surgical instrument robot (MU-LapaRobot) for assisting in conventional laparoscopic surgery.
Methods: A robot was designed based on instrument movement for a conventional procedure. The mechanism mimics and constrains manipulationmovement through the wire-driven transmission. It is flexible for robot end-effector, which has a lightweight and small size. The usability of therobot is passive and active robot tasks with an interconnected driving system. Three main parts of the robot are robot end-effector, transmission,and a driving system.
Results: On a robot platform, a parameter for setup is robot posture. The adjustment of robot position and projection of manipulation area is influenced bythe accuracy of movement. To verify movement, command and exact movements are measured. Compensation with the control system is improvedin order to improve the accuracy of the system.
Conclusion: MU-LapaRobot provides surgical instrument manipulation by using wire-driven transmission with an effective system and requires lessinterference in the conventional operation.},
keywords = {Bioengineering, Biomedical Engineering, Medicine (miscellaneous)},
pubstate = {published},
tppubtype = {article}
}
Methods: A robot was designed based on instrument movement for a conventional procedure. The mechanism mimics and constrains manipulationmovement through the wire-driven transmission. It is flexible for robot end-effector, which has a lightweight and small size. The usability of therobot is passive and active robot tasks with an interconnected driving system. Three main parts of the robot are robot end-effector, transmission,and a driving system.
Results: On a robot platform, a parameter for setup is robot posture. The adjustment of robot position and projection of manipulation area is influenced bythe accuracy of movement. To verify movement, command and exact movements are measured. Compensation with the control system is improvedin order to improve the accuracy of the system.
Conclusion: MU-LapaRobot provides surgical instrument manipulation by using wire-driven transmission with an effective system and requires lessinterference in the conventional operation.
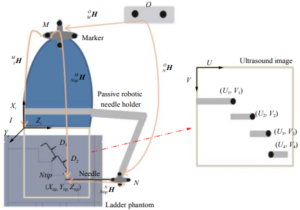
Suthakorn, Jackrit; Tanaiutchawoot, Narucha; Wiratkapan, Cholatip
Ultrasound Calibration with Ladder Phantom at Multiple Depths for Breast Biopsy Navigation System Journal Article
In: Theoretical and Applied Mechanics Letters, vol. 10, no. 5, pp. 343–353, 2020, ISSN: 2095-0349.
Links | BibTeX | Tags: Aerospace Engineering, Biomedical Engineering, Civil and Structural Engineering, Computational Mechanics, Environmental Engineering, Mechanical Engineering, Mechanics of Materials, Ocean Engineering
@article{Suthakorn2020,
title = {Ultrasound Calibration with Ladder Phantom at Multiple Depths for Breast Biopsy Navigation System},
author = {Jackrit Suthakorn and Narucha Tanaiutchawoot and Cholatip Wiratkapan},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/4.pdf},
doi = {10.1016/j.taml.2020.01.037},
issn = {2095-0349},
year = {2020},
date = {2020-07-00},
urldate = {2020-07-00},
journal = {Theoretical and Applied Mechanics Letters},
volume = {10},
number = {5},
pages = {343--353},
publisher = {Elsevier BV},
keywords = {Aerospace Engineering, Biomedical Engineering, Civil and Structural Engineering, Computational Mechanics, Environmental Engineering, Mechanical Engineering, Mechanics of Materials, Ocean Engineering},
pubstate = {published},
tppubtype = {article}
}
Direkwatana, Chawaphol; Suthakorn, Jackrit
Design of High Performance DC Motor Actuated Cable Driving System for Compact Devices Journal Article
In: International Journal of Power Electronics and Drive Systems (IJPEDS), vol. 11, no. 2, pp. 580–593, 2020, ISSN: 2722-256X.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, Energy Engineering and Power Technology
@article{Direkwatana2020b,
title = {Design of High Performance DC Motor Actuated Cable Driving System for Compact Devices},
author = {Chawaphol Direkwatana and Jackrit Suthakorn},
url = {https://bartlab.org/newweb/wp-content/uploads/2023/08/20622-39904-1-PB.pdf},
doi = {10.11591/ijpeds.v11.i2.pp580-593},
issn = {2722-256X},
year = {2020},
date = {2020-06-01},
urldate = {2020-06-01},
journal = {International Journal of Power Electronics and Drive Systems (IJPEDS)},
volume = {11},
number = {2},
pages = {580--593},
publisher = {Institute of Advanced Engineering and Science},
abstract = {The cable transmission is widely used in the remote operation or complex geometry with high stiffness and low backlash. Larger drum is required to reduce and error of transmission in long stroke. An error of the desired position occurs due to the fleet angle while cable winding on a drum. Therefore, a new cable driving module which overcomes this problem is proposed. A new cable driving module with a sliding platform is connected to the actuator unit. A motion of the sliding platform is corresponding to a screw rod connected to an actuator. The precision of the driving system is measured by a high-resolution rotatory encoder and high gear ratio actuator. Results are measured by load and error of the system. A load of system shows a performance of overall translation and rotation of the drum at different speeds. An error of the system is measured from forward and reverse direction by increasing and decreasing the number of turns with constant speed. A system has an average load consumption along a long stroke of cable winding which has no significant problem on the screw platform. Multiple turns have low error value in specific and continuous turn in forward and reverse motion. A new cable driving system is proved in precision movement. The fleet angle is eliminated in new mechanism. Along with a constraint motion, there is no significant change in load consumption. An error is low value in a different direction of movement. Hence, a new design of cable transmission can perform in high performance and small size of the system.},
keywords = {Electrical and Electronic Engineering, Energy Engineering and Power Technology},
pubstate = {published},
tppubtype = {article}
}
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; M.D, Sorayouth Chamnanvej
The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 2, pp. 1229–1238, 2020, ISSN: 2088-8708.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Sattayasoonthorn2020,
title = {The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej M.D},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/08/The-development-of-a-wireless-LCP-based-intracranial-pressure.pdf},
doi = {10.11591/ijece.v10i2.pp1229-1238},
issn = {2088-8708},
year = {2020},
date = {2020-04-01},
urldate = {2020-04-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {10},
number = {2},
pages = {1229--1238},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Raised intracranial pressure (ICP) in traumatic brain injury (TBI) patients can lead to death. ICP measurement is required to monitor the condition of a patient and to inform TBI treatment. This work presents a new wireless liquid crystal polymer (LCP) based ICP sensor. The sensor is designed with the purpose of measuring ICP and wirelessly transmitting the signal to an external monitoring unit. The sensor is minimally invasive and biocompatible due to the mechanical design and the use of LCP. A prototype sensor and associated wireless module are fabricated and tested to demonstrate the functionality and performance of the wireless LCP-based ICP sensor. Experimental results show that the wireless LCP-based ICP sensor can operate in the pressure range of 0 - 60.12 mmHg. Based on repeated measurements, the sensitivity of the sensor is found to be 25.62 µVmmHg-1, with a standard deviation of ± 1.16 µVmmHg-1. This work represents a significant step towards achieving a wireless, implantable, minimally invasive ICP monitoring strategy for TBI patients.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}

Pillai, Branesh M.; Wilasrusmee, Chumpon; Suthakorn, Jackrit
Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 1, pp. 828–839, 2020, ISSN: 2088-8708.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Pillai2020,
title = {Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting},
author = {Branesh M. Pillai and Chumpon Wilasrusmee and Jackrit Suthakorn},
url = {https://bartlab.org/newweb/wp-content/uploads/2023/08/19674-40468-1-PB.pdf},
doi = {10.11591/ijece.v10i1.pp828-839},
issn = {2088-8708},
year = {2020},
date = {2020-02-01},
urldate = {2020-02-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {10},
number = {1},
pages = {828--839},
publisher = {Institute of Advanced Engineering and Science},
abstract = {During laparoscopic surgeries, primary surgical tool insertion is the demanding and strenuous task. As the surgeon is unaware of the type of the tissue and associated parameters to conduct the insertion, therefore, to ease the procedure, the movement of the surgical tool needs to be controlled. It’s the operational capabilities that are to be manipulated to perform a smooth surgery even from a distant location. In this study, a robot system is being introduced for laparoscopic primary surgical tool insertion. It will incorporate a novel observer based dynamic control along with robot assisted bilateral control. Moreover, a virtual spring damper force lock system is introduced through which the slave system will notify the master regarding the target achieved and excessive force. The validation of the proposed control system is experimented with bilaterally controlled MU-LapaRobot. The experiment is comprising 3 cases of bilateral control criteria which are non-contact motion, contact motion, and limit force locking. The results defined the same value for contact and non-contact motion by 0.3N. The results depicted a force error of 3.6% and a position error of 5.8% which validated the proposed algorithm.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}

2019
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; Chamnanvej, Sorayouth
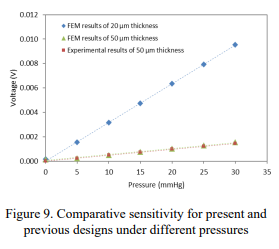
Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, 2019, ISSN: 2722-2578.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Sattayasoonthorn2019,
title = {Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/11.pdf},
doi = {10.11591/ijece.v9i5.pp4044-4052},
issn = {2722-2578},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {9},
number = {5},
publisher = {Institute of Advanced Engineering and Science},
abstract = {A biocompatible liquid crystal polymer (LCP) pressure sensor is proposed for measuring intracranial pressure (ICP) in Traumatic Brain Injury (TBI) patients. Finite element method using COMSOL multiphysics is employed to study the mechanical behavior of the packaged LCP pressure sensor in order to optimize the sensor design. A 3D model of the 8x8x0.2 mm LCP pressure sensor is simulated to investigate the parameters that significantly influence the sensor characteristics under the uniform pressure range of 0 to 50 mmHg. The simulation results of the new design are compared to the experimental results from a previous design. The result shows that reducing the thickness of the sensing membrane can increase the sensitivity up to six times of that previously reported. An improvement of fabrication methodology is proposed to complete the LCP packaging.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}
Nakdhamabhorn, Sakol; Suthakorn, Jackrit
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, iss. 1, no. 5, 2019, ISSN: 2722-2578.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, General Computer Science
@article{Nakdhamabhorn2019,
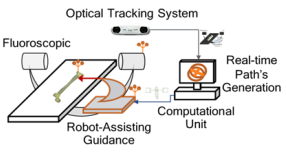
title = {System Integration of a Fluoroscopic Image Calibration using Robot Assisted Surgical Guidance for Distal Locking Process in Closed Intramedullary Nailing of Femur},
author = {Sakol Nakdhamabhorn and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/12.pdf},
doi = {10.11591/ijece.v9i5.pp3739-3750},
issn = {2722-2578},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {International Journal of Electrical and Computer Engineering (IJECE)},
volume = {9},
number = {5},
issue = {1},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Distal locking procedure is one of the most complex tasks in close intramedullary nailing operation which requires fluoroscopic image to interpret 2-D distal locking position on image related to 3-D distal locking position on the patient site. Hence the surgeon has to perform the distal locking process by using multiple fluoroscopic images which causes a lot of x-ray exposure to the patient and surgeon and is a time consuming task. This paper presents the system integration of a fluoroscopic image calibration using robot assisted surgical guidance. The system integration consists of three parts; distal locking recovery, fluoroscopic calibration and tracking, and robot assisted surgical guidance. The distal locking-hole recovery algorithm is based on characteristic information of the major and minor axes of distal locking hole. The fluoroscopic calibration and tracking is modeled as pin-hole projection model to estimate a projection equation based on optical tracking system. The robot-assisted surgical guidance is developed to overlay a trajectory path using a laser beam for reducing the problem of hand – eye coordination on most surgical navigation system. We integrate each part to complete a surgical navigation system for distal locking process. The experiment of system integration is conducted to validate the accuracy of distal locking axis position and orientation. The results of the system integration shows a mean angular error of 1.10 and mean Euclidean distance in X-Y plane error of 3.65 mm.},
keywords = {Electrical and Electronic Engineering, General Computer Science},
pubstate = {published},
tppubtype = {article}
}
Sattayasoonthorn, Preedipat; Suthakorn, Jackrit; Chamnanvej, Sorayouth
On the Feasibility of a Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Measurement Journal Article
In: Biomedical Engineering/Biomedizinische Technik (BMT), vol. 64, no. 5, pp. 543–553, 2019, ISSN: 1862-278X.
Abstract | Links | BibTeX | Tags: Biomedical Engineering
@article{Sattayasoonthorn2019b,
title = {On the Feasibility of a Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Measurement},
author = {Preedipat Sattayasoonthorn and Jackrit Suthakorn and Sorayouth Chamnanvej},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/13.pdf},
doi = {10.1515/bmt-2018-0029},
issn = {1862-278X},
year = {2019},
date = {2019-09-25},
urldate = {2019-09-25},
journal = {Biomedical Engineering/Biomedizinische Technik (BMT)},
volume = {64},
number = {5},
pages = {543--553},
publisher = {Walter de Gruyter GmbH},
abstract = {Intracranial pressure (ICP) monitoring is crucial in determining the appropriate treatment in traumatic brain injury. Minimally invasive approaches to monitor ICP are subject to ongoing research because they are expected to reduce infections and complications associated with conventional devices. This study aims to develop a wireless ICP monitoring device that is biocompatible, miniature and implantable. Liquid crystal polymer (LCP) was selected to be the main material for the device fabrication. This study considers the design, fabrication and testing of the sensing unit of the proposed wireless ICP monitoring device. A piezoresistive pressure sensor was designed to respond to 0–50 mm Hg applied pressure and fabricated on LCP by standard microelectromechanical systems (MEMS) procedures. The fabricated LCP pressure sensor was studied in a moist environment by means of a hydrostatic pressure test. The results showed a relative change in voltage and pressure from which the sensor’s sensitivity was deduced. This was a proof-of-concept study and based on the results of this study, a number of recommendations for improving the considered sensor performance were made. The limitations are discussed, and future design modifications are proposed that should lead to a complete LCP package with an improved performance for wireless, minimally invasive ICP monitoring.},
keywords = {Biomedical Engineering},
pubstate = {published},
tppubtype = {article}
}
Chumnanvej, Sorayouth; Pillai, Branesh M.; Suthakorn, Jackrit
Surgical Robotic Technology for Developing an Endonasal Endoscopic Transsphenoidal Surgery (EETS) Robotic System Journal Article
In: The Open Neurology Journal (TONEUJ), vol. 13, no. 1, pp. 96–106, 2019, ISSN: 1874-205X.
Abstract | Links | BibTeX | Tags: Neurology, Neurology (clinical), Psychiatry and Mental health
@article{Chumnanvej2019b,
title = {Surgical Robotic Technology for Developing an Endonasal Endoscopic Transsphenoidal Surgery (EETS) Robotic System},
author = {Sorayouth Chumnanvej and Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/8.pdf},
doi = {10.2174/1874205x01913010096},
issn = {1874-205X},
year = {2019},
date = {2019-08-31},
urldate = {2019-08-31},
journal = {The Open Neurology Journal (TONEUJ)},
volume = {13},
number = {1},
pages = {96--106},
publisher = {Bentham Science Publishers Ltd.},
abstract = {Purpose: Neurosurgical robots are acknowledged for their advantages in assisting neurosurgeons in enhancing their precision and accuracy. Here, the aim of this study is to report the first use as a robot-assisted Endonasal Endoscopic Transsphenoidal (EET) approach, applied to reach sphenoid sinus in a cadaver. The introduction of the seven tenets for the Endonasal Endoscopic Transsphenoidal approach will propel the feasibility of neurosurgical techniques and instruments for intrasellar lesions.
Methods: Endonasal endoscopic transsphenoidal approach in a cadaver was performed under robot assistance with simple navigation system. This preliminary study reveals the accuracy and precision of the robot to reach a target at sphenoid sinus safely and within the shortest duration.
Results: This robotic technology provided the foundation to support neurosurgeons when they are working in narrow and complicated surgical corridors with accuracy and precision.
Conclusion: This article reveals the first robot-assisted Endonasal Endoscopic Transsphenoidal approach. This demonstrates the feasibility of the evolution and will augment neurosurgeons toward their limits of minimally invasive surgical techniques, manual dexterity, and spatial orientation. These tenets will be as state of the art and overcome the future challenges of Endonasal Endoscopic Transsphenoidal approach shortly.},
keywords = {Neurology, Neurology (clinical), Psychiatry and Mental health},
pubstate = {published},
tppubtype = {article}
}
Methods: Endonasal endoscopic transsphenoidal approach in a cadaver was performed under robot assistance with simple navigation system. This preliminary study reveals the accuracy and precision of the robot to reach a target at sphenoid sinus safely and within the shortest duration.
Results: This robotic technology provided the foundation to support neurosurgeons when they are working in narrow and complicated surgical corridors with accuracy and precision.
Conclusion: This article reveals the first robot-assisted Endonasal Endoscopic Transsphenoidal approach. This demonstrates the feasibility of the evolution and will augment neurosurgeons toward their limits of minimally invasive surgical techniques, manual dexterity, and spatial orientation. These tenets will be as state of the art and overcome the future challenges of Endonasal Endoscopic Transsphenoidal approach shortly.

Chalongwongse, Suwiphat; Chumnanvej, Sorayouth; Suthakorn, Jackrit
Analysis of Endonasal Endoscopic Transsphenoidal (EET) Surgery Pathway and Workspace for Path Guiding Robot Design Journal Article
In: Asian Journal of Surgery, vol. 42, no. 8, pp. 814–822, 2019, ISSN: 1015-9584.
Links | BibTeX | Tags: Surgery
@article{Chalongwongse2019,
title = {Analysis of Endonasal Endoscopic Transsphenoidal (EET) Surgery Pathway and Workspace for Path Guiding Robot Design},
author = {Suwiphat Chalongwongse and Sorayouth Chumnanvej and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/14.pdf},
doi = {10.1016/j.asjsur.2018.12.016},
issn = {1015-9584},
year = {2019},
date = {2019-08-00},
urldate = {2019-08-00},
journal = {Asian Journal of Surgery},
volume = {42},
number = {8},
pages = {814--822},
publisher = {Elsevier BV},
keywords = {Surgery},
pubstate = {published},
tppubtype = {article}
}
Chumnanvej, Sorayouth; Pattamarakha, Duangkamol; Sudsang, Thanwa; Suthakorn, Jackrit
Anatomical Workspace Study of Endonasal Endoscopic Transsphenoidal Approach Journal Article
In: The Open Medicine, vol. 14, no. 1, pp. 537–544, 2019, ISSN: 2391-5463.
Abstract | Links | BibTeX | Tags: General Medicine
@article{Chumnanvej2019,
title = {Anatomical Workspace Study of Endonasal Endoscopic Transsphenoidal Approach},
author = {Sorayouth Chumnanvej and Duangkamol Pattamarakha and Thanwa Sudsang and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/7.pdf},
doi = {10.1515/med-2019-0060},
issn = {2391-5463},
year = {2019},
date = {2019-07-19},
urldate = {2019-07-19},
journal = {The Open Medicine},
volume = {14},
number = {1},
pages = {537--544},
publisher = {Walter de Gruyter GmbH},
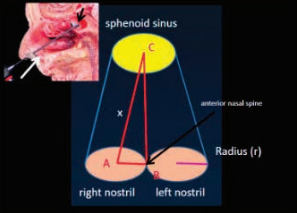
abstract = {Purpose: To determine the workspace through an anatomical dimensional study of the skull base to further facilitate the design of the robot for endonasal endoscopic transsphenoidal (EET) surgery.
Methods: There were 120 cases having a paranasal sinus CT scan in the database. The internal volumes of the nasal cavities (NC), the volumes of the sphenoid sinuses (SS), and the distance between the anterior nasal spine and base of the sellar (d-ANS-BS) were measured.
Results: The Pearson correlation coefficient (PCC) between the relevant distances and the volumes of the right NC was 0.32; between the relevant distances and the volumes of the left NC was 0.43; and between the relevant distances and volumes of NC was 0.41; with a statistically significant difference (p < 0.001). All PCCs had a statistically significant meaningful difference (p < 0.05).
Conclusion: The volume of NCs were significantly correlated with distances (p < 0.05). The safest and shortest distance to guide the robotic arm length in the EET approach could be represented by d-ANS-BS. This result was also used as primary information for further robotic design.},
keywords = {General Medicine},
pubstate = {published},
tppubtype = {article}
}
Methods: There were 120 cases having a paranasal sinus CT scan in the database. The internal volumes of the nasal cavities (NC), the volumes of the sphenoid sinuses (SS), and the distance between the anterior nasal spine and base of the sellar (d-ANS-BS) were measured.
Results: The Pearson correlation coefficient (PCC) between the relevant distances and the volumes of the right NC was 0.32; between the relevant distances and the volumes of the left NC was 0.43; and between the relevant distances and volumes of NC was 0.41; with a statistically significant difference (p < 0.001). All PCCs had a statistically significant meaningful difference (p < 0.05).
Conclusion: The volume of NCs were significantly correlated with distances (p < 0.05). The safest and shortest distance to guide the robotic arm length in the EET approach could be represented by d-ANS-BS. This result was also used as primary information for further robotic design.
Pillai, Branesh M.; Suthakorn, Jackrit
Challenges for Novice Developers in Rough Terrain Rescue Robots: A Survey on Motion Control Systems Journal Article
In: Journal of Control Science and Engineering, vol. 2019, pp. 1–12, 2019, ISSN: 1687-5257.
Abstract | Links | BibTeX | Tags: Computer Science Applications, Electrical and Electronic Engineering, Modeling and Simulation
@article{Pillai2019,
title = {Challenges for Novice Developers in Rough Terrain Rescue Robots: A Survey on Motion Control Systems},
author = {Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/10.pdf},
doi = {10.1155/2019/2135914},
issn = {1687-5257},
year = {2019},
date = {2019-06-02},
urldate = {2019-06-02},
journal = {Journal of Control Science and Engineering},
volume = {2019},
pages = {1--12},
publisher = {Hindawi Limited},
abstract = {Several researchers have revealed the huge potentials of rescue robots in disaster zones. In addition to searching for victims, these intelligent machines are also effective in obtaining useful information from the zones. These functions help to optimize the search and rescue missions. However, the fact that rescue robots have to operate in risky and dangerous environments necessitates the need for such machines to have an efficient motion control system, which can help them to operate autonomously or with minimal human control. This paper reviews the use of reliable controllers in enhancing the sensing capabilities of rescue robots. Huge potential of sensorless sensing method in the rescue robots are highlighted. It is shown that the use of sensorless sensing method enables developer to create simple and cheaper robots for various complex situations. Thus, it is imperative to conduct further studies on how to optimize the operations of robots that lack sensors.},
keywords = {Computer Science Applications, Electrical and Electronic Engineering, Modeling and Simulation},
pubstate = {published},
tppubtype = {article}
}

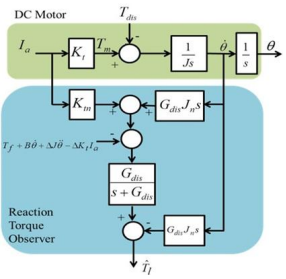
Pillai, Branesh M; Suthakorn, Jackrit
Motion Control Applications: Observer Based DC Motor Parameters Estimation for Novices Journal Article
In: International Journal of Power Electronics and Drive Systems (IJPEDS), vol. 10, no. 1, pp. 195–210, 2019, ISSN: 2088-8694.
Abstract | Links | BibTeX | Tags: Electrical and Electronic Engineering, Energy Engineering and Power Technology
@article{Pillai2019b,
title = {Motion Control Applications: Observer Based DC Motor Parameters Estimation for Novices},
author = {Branesh M Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/15.pdf},
doi = {10.11591/ijpeds.v10.i1.pp195-210},
issn = {2088-8694},
year = {2019},
date = {2019-03-01},
urldate = {2019-03-01},
journal = {International Journal of Power Electronics and Drive Systems (IJPEDS)},
volume = {10},
number = {1},
pages = {195--210},
publisher = {Institute of Advanced Engineering and Science},
abstract = {Estimation of motor inertia and friction components is a complex and challenging task in motion control applications where small size DC motors (<100W) are used for precise control. It is essential to estimate the accurate friction components and motor inertia, because the parameters provided by the manufacturer are not always accurate. This research proposes a Sensorless method of determining DC motor parameters, including moment of inertia, torque coefficient and frictional components using the Disturbance Observer (DOB) as a torque sensor. The constant velocity motion test and a novel Reverse Motion Acceleration test were conducted to estimate frictional components and moment of inertia of the motor. The validity of the proposed novel method was verified by experimental results and compared with conventional acceleration and deceleration motion tests. Experiments have been carried out to show the effectiveness and viability of the estimated parameters using a Reaction Torque Observer (RTOB) based friction compensation method.},
keywords = {Electrical and Electronic Engineering, Energy Engineering and Power Technology},
pubstate = {published},
tppubtype = {article}
}
Chatrasingh, Maria; Suthakorn, Jackrit
A novel Design of N-Fiducial Phantom for Automatic Ultrasound Calibration Journal Article
In: Journal of Medical Physics, vol. 44, no. 3, pp. 191–200, 2019, ISSN: 0971-6203.
Links | BibTeX | Tags: Biophysics, Nuclear Medicine and imaging, Radiology
@article{Suthakorn2019,
title = {A novel Design of N-Fiducial Phantom for Automatic Ultrasound Calibration},
author = {Maria Chatrasingh and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/9.pdf},
doi = {10.4103/jmp.jmp_92_18},
issn = {0971-6203},
year = {2019},
date = {2019-00-00},
urldate = {2019-00-00},
journal = {Journal of Medical Physics},
volume = {44},
number = {3},
pages = {191--200},
publisher = {Medknow},
keywords = {Biophysics, Nuclear Medicine and imaging, Radiology},
pubstate = {published},
tppubtype = {article}
}
Chumnanvej, Sorayouth; Chalongwongse, Suwiphat; Pillai, Branesh M.; Suthakorn, Jackrit
Pathway and Workspace Study of Endonasal Endoscopic Transsphenoidal (EET) Approach in 80 Cadavers Journal Article
In: International Journal of Surgery Open, vol. 16, pp. 22–28, 2019, ISSN: 2405-8572.
Links | BibTeX | Tags: Surgery
@article{Chumnanvej2019c,
title = {Pathway and Workspace Study of Endonasal Endoscopic Transsphenoidal (EET) Approach in 80 Cadavers},
author = {Sorayouth Chumnanvej and Suwiphat Chalongwongse and Branesh M. Pillai and Jackrit Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/16.pdf},
doi = {10.1016/j.ijso.2018.12.002},
issn = {2405-8572},
year = {2019},
date = {2019-00-00},
urldate = {2019-00-00},
journal = {International Journal of Surgery Open},
volume = {16},
pages = {22--28},
publisher = {Elsevier BV},
keywords = {Surgery},
pubstate = {published},
tppubtype = {article}
}

2018
Suthakorn, Jackrit; Tanaiutchawoot, Narucha; Wiratkapan, Cholatip; Ongwattanakul, Songpol
Breast Biopsy Navigation System with an Assisted Needle Holder Tool and 2D Graphical User Interface Journal Article
In: European Journal of Radiology Open, vol. 5, pp. 93–101, 2018, ISSN: 2352-0477.
Links | BibTeX | Tags: Nuclear Medicine and imaging, Radiology
@article{Suthakorn2018,
title = {Breast Biopsy Navigation System with an Assisted Needle Holder Tool and 2D Graphical User Interface},
author = {Jackrit Suthakorn and Narucha Tanaiutchawoot and Cholatip Wiratkapan and Songpol Ongwattanakul},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/17.pdf},
doi = {10.1016/j.ejro.2018.07.001},
issn = {2352-0477},
year = {2018},
date = {2018-00-00},
urldate = {2018-00-00},
journal = {European Journal of Radiology Open},
volume = {5},
pages = {93--101},
publisher = {Elsevier BV},
keywords = {Nuclear Medicine and imaging, Radiology},
pubstate = {published},
tppubtype = {article}
}
2015
Patel, Sneha; Suthakorn, Jackrit
Validation Study of a Wave Equation Model of Soft Tissue for a New Virtual Reality Laparoscopy Training System Journal Article
In: Biomedical Engineering Systems and Technologies, vol. 574, pp. 256–271, 2015, ISBN: 9783319277073.
@article{Patel2015,
title = {Validation Study of a Wave Equation Model of Soft Tissue for a New Virtual Reality Laparoscopy Training System},
author = {Sneha Patel and Jackrit Suthakorn},
editor = {Fred, A.; Gamboa, H.; and Elias, D.},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/Validation-Study-of-a-Wave-Equation-model-of-soft-tissue-for-a-new-virtual-reality-laparoscopy.pdf},
doi = {10.1007/978-3-319-27707-3_16},
isbn = {9783319277073},
year = {2015},
date = {2015-00-00},
urldate = {2015-00-00},
booktitle = {Biomedical Engineering Systems and Technologies},
journal = {Biomedical Engineering Systems and Technologies},
volume = {574},
pages = {256--271},
publisher = {Springer International Publishing},
series = {Communications in Computer and Information Science},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2013
Sheh, Raymond; Jacoff, Adam; Virts, Ann-Marie; Kimura, Tetsuya; Pellenz, Johannes; Schwertfeger, Sören; Suthakorn, Jackrit
Advancing the State of Urban Search and Rescue Robotics Through the RoboCupRescue Robot League Competition Journal Article
In: Field and Service Robotics, vol. 92, pp. 127–142, 2013, ISBN: 9783642406867.
@article{Sheh2013,
title = {Advancing the State of Urban Search and Rescue Robotics Through the RoboCupRescue Robot League Competition},
author = {Raymond Sheh and Adam Jacoff and Ann-Marie Virts and Tetsuya Kimura and Johannes Pellenz and Sören Schwertfeger and Jackrit Suthakorn},
editor = {Yoshida, K.; and Tadokoro, S.},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/sheh12advancing-fsr.pdf},
doi = {10.1007/978-3-642-40686-7_9},
isbn = {9783642406867},
year = {2013},
date = {2013-12-31},
urldate = {2013-12-31},
booktitle = {Springer Tracts in Advanced Robotics},
journal = {Field and Service Robotics},
volume = {92},
pages = {127--142},
publisher = {Springer Berlin Heidelberg},
series = {Springer Tracts in Advanced Robotics},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2012
Wilasrusmee, Chumpon; Suthakorn, Jackrit; Itsarachaiyot, Yuttana
A Robotic Monofilament Test for Diabetic Neuropathy: From Bench to Clinic Journal Article
In: Journal of Diabetes and Metabolism, vol. 03, no. 02, pp. 02–04, 2012, ISSN: 2155-6156.
@article{Wilasrusmee2012,
title = {A Robotic Monofilament Test for Diabetic Neuropathy: From Bench to Clinic},
author = {Chumpon Wilasrusmee and Jackrit Suthakorn and Yuttana Itsarachaiyot},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/A-Robotic-Monofilament-Test-for-Diabetic-Neuropathy-From-Bench-to-Clinic.pdf},
doi = {10.4172/2155-6156.1000179},
issn = {2155-6156},
year = {2012},
date = {2012-00-00},
urldate = {2012-00-00},
journal = {Journal of Diabetes and Metabolism},
volume = {03},
number = {02},
pages = {02--04},
publisher = {OMICS Publishing Group},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Onprasert, Woratit; Ongwattanakul, Songpol; Suthakorn, Jackrit
Implementation on a New Tool Tip Calibration Method for Biomedical Applications Journal Article
In: Recent Advances in Computer Science and Information Engineering, vol. 125, pp. 385–392, 2012, ISBN: 9783642257780.
@article{Onprasert2012,
title = {Implementation on a New Tool Tip Calibration Method for Biomedical Applications},
author = {Woratit Onprasert and Songpol Ongwattanakul and Jackrit Suthakorn},
editor = {Qian, Z., Cao, L.; and Su, W.},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/book.pdf},
doi = {10.1007/978-3-642-25778-0_53},
isbn = {9783642257780},
year = {2012},
date = {2012-00-00},
urldate = {2012-00-00},
booktitle = {Recent Advances in Computer Science and Information Engineering},
journal = {Recent Advances in Computer Science and Information Engineering},
volume = {125},
pages = {385--392},
publisher = {Springer Berlin Heidelberg},
series = { Lecture Notes in Electrical Engineering},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
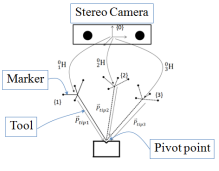
Nakdhamabhorn, Sakol; Suthakorn, Jackrit
On the Design and Experiments of a Fluoro-Robotic Navigation System for Closed Intramedullary Nailing of Femur Journal Article
In: Recent Advances in Computer Science and Information Engineering, vol. 125, pp. 195–203, 2012, ISBN: 9783642257896.
@article{Nakdhamabhorn2012,
title = {On the Design and Experiments of a Fluoro-Robotic Navigation System for Closed Intramedullary Nailing of Femur},
author = {Sakol Nakdhamabhorn and Jackrit Suthakorn},
editor = {Qian, Z., Cao, L.; and Su, W.},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/bee.pdf},
doi = {10.1007/978-3-642-25789-6_29},
isbn = {9783642257896},
year = {2012},
date = {2012-00-00},
urldate = {2012-00-00},
booktitle = {Recent Advances in Computer Science and Information Engineering},
journal = {Recent Advances in Computer Science and Information Engineering},
volume = {125},
pages = {195--203},
publisher = {Springer Berlin Heidelberg},
series = {Lecture Notes in Electrical Engineering},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
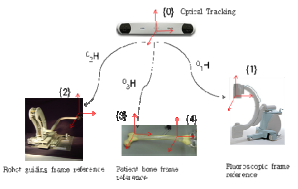
2010
Wilasrusmee, Chumpon; Suthakorn, Jackrit; Guerineau, Claire; Itsarachaiyot, Yuttana; Sa-Ing, Vera; Proprom, Napaphat; Lertsithichai, Panuwat; Jirasisrithum, Sopon; Kittur, Dilip
A Novel Robotic Monofilament Test for Diabetic Neuropathy Journal Article
In: Asian Journal of Surgery, vol. 33, no. 4, pp. 193–198, 2010, ISSN: 1015-9584.
Links | BibTeX | Tags: Surgery
@article{Wilasrusmee2010,
title = {A Novel Robotic Monofilament Test for Diabetic Neuropathy},
author = {Chumpon Wilasrusmee and Jackrit Suthakorn and Claire Guerineau and Yuttana Itsarachaiyot and Vera Sa-Ing and Napaphat Proprom and Panuwat Lertsithichai and Sopon Jirasisrithum and Dilip Kittur},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/A_novel_Robotic_monofilament_test_Diabetic_neuropathy.pdf},
doi = {10.1016/s1015-9584(11)60006-7},
issn = {1015-9584},
year = {2010},
date = {2010-10-00},
urldate = {2010-10-00},
journal = {Asian Journal of Surgery},
volume = {33},
number = {4},
pages = {193--198},
publisher = {Elsevier BV},
keywords = {Surgery},
pubstate = {published},
tppubtype = {article}
}
2008
Wilasrusmee, Chumpon; Suvikrom, Jesada; Suthakorn, Jackrit; Lertsithichai, Panuwat; Sitthiseriprapip, Kriskrai; Proprom, Napaphat; Kittur, Dilip S
Three-Dimensional Aortic Aneurysm Model and Endovascular Repair: An Educational Tool for Surgical Trainees Journal Article
In: International Journal of Angiology, vol. 17, no. 03, pp. 129–133, 2008, ISSN: 1615-5939.
Links | BibTeX | Tags: Cardiology and Cardiovascular Medicine
@article{Wilasrusmee2008,
title = {Three-Dimensional Aortic Aneurysm Model and Endovascular Repair: An Educational Tool for Surgical Trainees},
author = {Chumpon Wilasrusmee and Jesada Suvikrom and Jackrit Suthakorn and Panuwat Lertsithichai and Kriskrai Sitthiseriprapip and Napaphat Proprom and Dilip S Kittur},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/3DAorticAneurysm.pdf},
doi = {10.1055/s-0031-1278295},
issn = {1615-5939},
year = {2008},
date = {2008-09-00},
urldate = {2008-09-00},
journal = {International Journal of Angiology},
volume = {17},
number = {03},
pages = {129--133},
publisher = {Georg Thieme Verlag KG},
keywords = {Cardiology and Cardiovascular Medicine},
pubstate = {published},
tppubtype = {article}
}
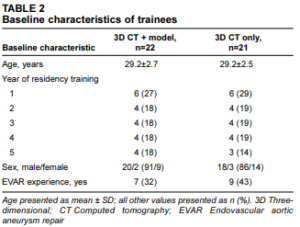
2006
Suthakorn, J.; Parker, G. G.
Anti-Swing Control of Suspended Loads on Shipboard Robotic Cranes Journal Article
In: Journal of Systematics, Cybernatics, and Informatics, vol. 3, no. 1, pp. 141-146, 2006.
@article{Suthakorn2006e,
title = {Anti-Swing Control of Suspended Loads on Shipboard Robotic Cranes},
author = {Suthakorn, J. and Parker, G.G.},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/Anti_Swing_Control_of_Suspended_loads_on_shipboard_robotics_cranes.pdf},
year = {2006},
date = {2006-01-01},
urldate = {2006-01-01},
journal = {Journal of Systematics, Cybernatics, and Informatics},
volume = {3},
number = {1},
pages = {141-146},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
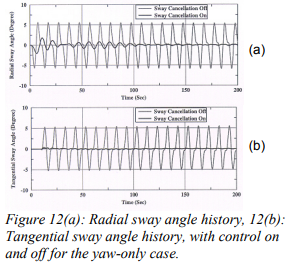
U.-Thainual, P.; Suthakorn, J.
A New Algorithm for Recovering Distal Holes' Pose in Intramedullary Nail Journal Article
In: Journal of Biomechanics, vol. 39, pp. 209, 2006, ISSN: 0021-9290.
Links | BibTeX | Tags: Biomedical Engineering, Biophysics, Orthopedics and Sports Medicine, Rehabilitation
@article{U.-Thainual2006,
title = {A New Algorithm for Recovering Distal Holes' Pose in Intramedullary Nail},
author = {P. U.-Thainual and J. Suthakorn},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/A_new_Algorithm_for_Recovering_Distal_Holes-Pose_in_intramedullary_nail.pdf},
doi = {10.1016/s0021-9290(06)83764-4},
issn = {0021-9290},
year = {2006},
date = {2006-01-00},
urldate = {2006-01-00},
journal = {Journal of Biomechanics},
volume = {39},
pages = {209},
publisher = {Elsevier BV},
keywords = {Biomedical Engineering, Biophysics, Orthopedics and Sports Medicine, Rehabilitation},
pubstate = {published},
tppubtype = {article}
}
Suthakorn, Jackrit; Lee, Sangyoon; Zhou, Yu; Choudhury, Sayeed; Chirikjian, Gregory S.
An Enhanced Robotic Library System for an Off-Site Shelving Facility Journal Article
In: Field and Service Robotics: Recent Advances in Research and Applications, Series: Springer Tracts in Advanced Robotics, vol. 24, pp. 437–446, 2006, ISBN: 9783540328544.
@article{Suthakorn2006c,
title = {An Enhanced Robotic Library System for an Off-Site Shelving Facility},
author = {Jackrit Suthakorn and Sangyoon Lee and Yu Zhou and Sayeed Choudhury and Gregory S. Chirikjian},
editor = {Yuta, S.; Asama, H.; Thrun, S.; Prassier, E.; and Tsubouchi, T.},
url = {http://bartlab.org/newweb/wp-content/uploads/2023/06/An_Enhanced_Robotic_Library_System_for_an_Off-site_Shelving_Facility.pdf},
doi = {10.1007/10991459_42},
isbn = {9783540328544},
year = {2006},
date = {2006-00-00},
urldate = {2006-00-00},
booktitle = {Springer Tracts in Advanced Robotics},
journal = {Field and Service Robotics: Recent Advances in Research and Applications, Series: Springer Tracts in Advanced Robotics},
volume = {24},
pages = {437--446},
publisher = {Springer Berlin Heidelberg},
keywords = {},
pubstate = {published},
tppubtype = {article}
}