
Books
2025
Design and Implementation of Standardized Mobile Robots for Optimizing Medical Supply Distribution and Patient Care: Intelligent Automation in Healthcare Book
IGI Global Scientific Publishing, 2025.

2024
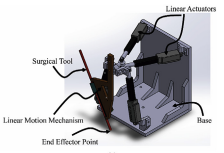
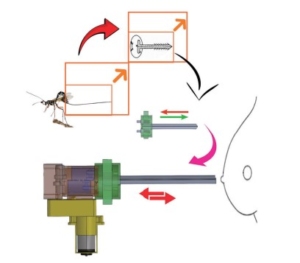
Human–Robot Interaction in Biopsy Procedures: A Biomimetic Dual-Sheath Needle Design Inspired by Insect Ovipositor Mechanics Book
Springer, 2024.
2012
Development of Medical Navigation Systems for Orthopedic Surgery Book
Pacharaporn Printing House, 2012, ISBN: 978-616-279-090-4.
2010
Computer-Integrated Surgery Book Chapter
In: Ritthipravat, Panrasee (Ed.): Introduction to Biomedical Engineering, Chapter 9, pp. 215-253, TPA Production House, 2010, ISBN: 978-974-443-419-7.
2009
Mechanical Vibrations Book
4 Road Printing, 2009, ISBN: 978-974-110-993-7.
2007
Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007) Book
Center for Biomedical and Robotics Technology, 2007, ISBN: 9-78974-11077-6.
2006
Journal of Thai Robotics Society Book
TPA Production House, 2006, ISSN: 1513-8240.
Proceedings of the 2nd International Symposium on Biomedical Engineering (ISBME 2006) Book
TPA Production House, 2006, ISBN: 974-11-0634-3.
2005
Journal of Thai Robotics Society Book
TPA Production House, 2005, ISSN: 1513-8240.
2004
Journal of Thai Robotics Society Book
TPA Production House, 2004, ISSN: 1513-8240.
International Journals
2025
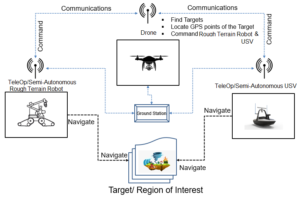
A pack hunting strategy for heterogeneous robots in rescue operations Journal Article
In: Bioinspiration & Biomimetics, vol. 20, no. 1, pp. 016029, 2025.
Optimizing robot anomaly detection through stochastic differential approximation and Brownian motion Journal Article
In: IAES International Journal of Robotics and Automation, vol. 14, no. 1, pp. 19–30, 2025.
Development and evaluation of an integrated image-guided robotic system for hair transplant surgery Journal Article
In: Computational and Structural Biotechnology Journal, vol. 28, pp. 80–93, 2025.
Adaptive polynomial predictive filter for sensor data estimation and prediction in interference environment Journal Article
In: IET Control Theory & Applications, vol. 19, no. 1, pp. e12771, 2025.
2024
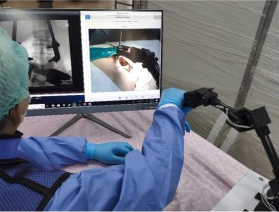
Sensorless based Haptic Feedback Integration in Robot-Assisted Pedicle Screw Insertion for Lumbar Spine Surgery: A Preliminary Cadaveric Study Journal Article
In: Computational and Structural Biotechnology Journal, vol. 24, pp. 420-433, 2024.
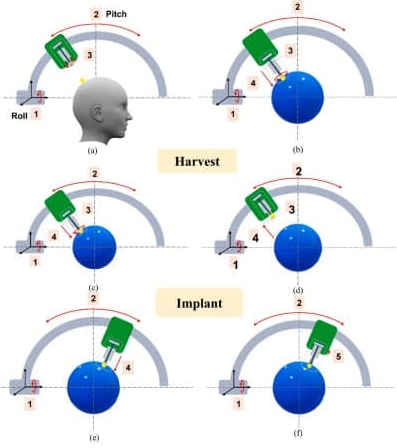
Design, Proof-of-Concept of Single Robotic Hair Transplant Mechanisms for Both Harvest and Implant of Hair Grafts Journal Article
In: Computational and Structural Biotechnology Journal, vol. 24, pp. 31-45, 2024, ISSN: 2001-0370.
In: Advanced Robotics, vol. 0, no. 0, pp. 1-23, 2024.
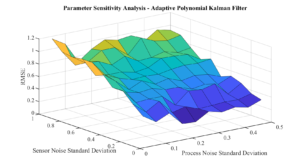
Adaptive polynomial Kalman filter for nonlinear state estimation in modified AR time series with fixed coefficients Journal Article
In: IET Control Theory & Applications, pp. 1806-1824, 2024.
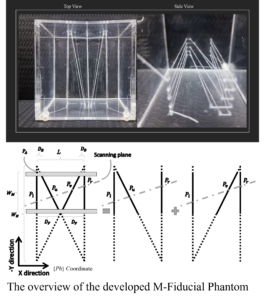
M-Fiducial Phantom Based Fast Automatic Ultrasound Calibration Technique: A Novel Approach for 2D to 3D Image Registration Journal Article
In: Heliyon, 2024.
Revised in-depth meta-analysis on the efficacy of robot-assisted versus traditional free-hand pedicle screw insertion Journal Article
In: Laparoscopic, Endoscopic and Robotic Surgery, 2024.
Adaptive polynomial predictive filter for sensor data estimation and prediction in interference environment Journal Article
In: IET Control Theory & Applications, 2024.
2023
Nonlinear Dynamic States’ Estimation and Prediction Using Polynomial Predictive Modeling Journal Article
In: IEEE Canadian Journal of Electrical and Computer Engineering, vol. 46, no. 3, pp. 185-195, 2023.
A Generalized Closed-Form Solution for 3D Registration of Two-Point Sets under Isotropic and Anisotropic Scaling Journal Article
In: Results in Physics, vol. 51, pp. 106746, 2023, ISSN: 2211-3797.

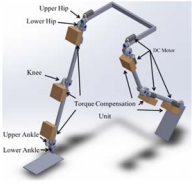
Lower Limb Exoskeleton with Energy-Storing Mechanism for Spinal Cord Injury Rehabilitation Journal Article
In: IEEE Access, vol. 11, pp. 133850-133866, 2023.
Cost-effectiveness of robotic-assisted spinal surgery: a single-center retrospective study Journal Article
In: Laparoscopic, Endoscopic and Robotic Surgery, vol. 6, no. 4, pp. 147–153, 2023.
2022
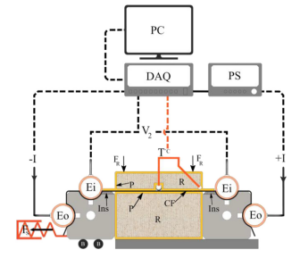
Concurrent Function of High-Strength Dry Carbon Fiber as Resistive Heating Element and Thermistor in Ambient air Journal Article
In: Heliyon, vol. 8, no. 12, pp. e12051, 2022, ISSN: 2405-8440.
Surface Coating of Orthopedic Implant to Enhance the Osseointegration and Reduction of Bacterial Colonization: A Review Journal Article
In: Biomaterials Research, vol. 26, no. 1, pp. 1–17, 2022, ISSN: 2055-7124.

Biomechanical Trajectory Optimization of Human Sit-to-Stand Motion with Stochastic Motion Planning Framework Journal Article
In: IEEE Transactions on Medical Robotics and Bionics, vol. 4, no. 4, pp. 1022–1033, 2022, ISSN: 2576-3202.
In: Sensors, vol. 22, no. 22, 2022, ISSN: 1424-8220.

Modeling and Design of a Stair Climbing Wheelchair with Pose Estimation and Adjustment Journal Article
In: J Intell Robot Syst, vol. 106, no. 3, 2022, ISSN: 1573-0409.

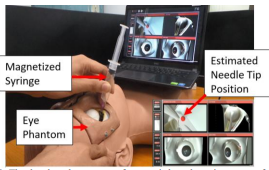
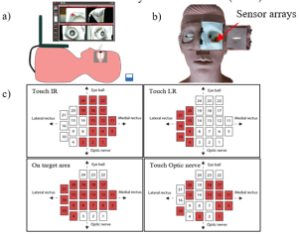
The Development of a Virtual Simulator for a Novel Design Non-Permanent Magnetic Needle Based Eye Anesthesia Training System Journal Article
In: IEEE Access, vol. 10, pp. 99762–99775, 2022, ISSN: 2169-3536.

2021
Ultrasound Triggered Drug Release from Affinity-Based β-Cyclodextrin Polymers for Infection Control Journal Article
In: Annals of Biomedical Engineering, vol. 49, no. 9, pp. 2513–2521, 2021, ISSN: 1573-9686.
In: The Open Biomedical Engineering Journal (TOBEJ), vol. 15, no. 1, pp. 16–28, 2021, ISSN: 1874-1207.
The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 3, pp. 1368–1379, 2021, ISSN: 2302-9285.

Design and Development of Sensorless Based 5-DOF Bilaterally Controlled Surgical Manipulator: A Prototype Journal Article
In: Bulletin of Electrical Engineering and Informatics, vol. 10, no. 2, pp. 619–631, 2021, ISSN: 2302-9285.
Endonasal Endoscopic Transsphenoidal Approach Robot Prototype: A Cadaveric Trial Journal Article
In: Asian Journal of Surgery, vol. 44, no. 1, pp. 345–351, 2021, ISSN: 1015-9584.
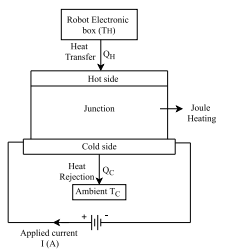
Model Predictive Control-Based Thermoelectric Cooling for Rough Terrain Rescue Robots Journal Article
In: IEEE Access, vol. 9, pp. 167652–167662, 2021, ISSN: 2169-3536.
2020
MU-LapaRobot: A Corporative Surgical Robot for Laparoscopic Surgery Journal Article
In: The Open Biomedical Engineering Journal (TOBEJ), vol. 14, no. 1, pp. 43–54, 2020, ISSN: 1874-1207.
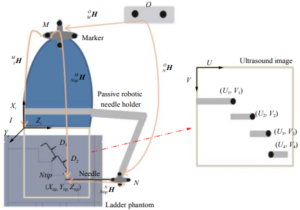
Ultrasound Calibration with Ladder Phantom at Multiple Depths for Breast Biopsy Navigation System Journal Article
In: Theoretical and Applied Mechanics Letters, vol. 10, no. 5, pp. 343–353, 2020, ISSN: 2095-0349.
Design of High Performance DC Motor Actuated Cable Driving System for Compact Devices Journal Article
In: International Journal of Power Electronics and Drive Systems (IJPEDS), vol. 11, no. 2, pp. 580–593, 2020, ISSN: 2722-256X.
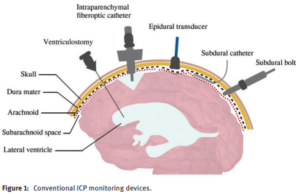
The Development of a Wireless LCP-Based Intracranial Pressure Sensor for Traumatic Brain Injury Patients Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 2, pp. 1229–1238, 2020, ISSN: 2088-8708.

Observer Based Dynamic Control Model for Bilaterally Controlled MU-Lapa Tobot: Surgical Tool Force Limiting Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 10, no. 1, pp. 828–839, 2020, ISSN: 2088-8708.

2019
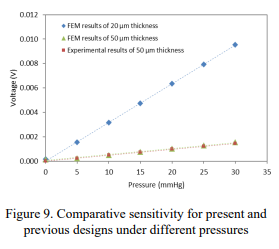
Sensitivity and Packaging Improvement of an LCP Pressure Sensor for Intracranial Pressure Measurement via FEM Simulation Journal Article
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, 2019, ISSN: 2722-2578.
In: International Journal of Electrical and Computer Engineering (IJECE), vol. 9, iss. 1, no. 5, 2019, ISSN: 2722-2578.
On the Feasibility of a Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Measurement Journal Article
In: Biomedical Engineering/Biomedizinische Technik (BMT), vol. 64, no. 5, pp. 543–553, 2019, ISSN: 1862-278X.
Surgical Robotic Technology for Developing an Endonasal Endoscopic Transsphenoidal Surgery (EETS) Robotic System Journal Article
In: The Open Neurology Journal (TONEUJ), vol. 13, no. 1, pp. 96–106, 2019, ISSN: 1874-205X.

Analysis of Endonasal Endoscopic Transsphenoidal (EET) Surgery Pathway and Workspace for Path Guiding Robot Design Journal Article
In: Asian Journal of Surgery, vol. 42, no. 8, pp. 814–822, 2019, ISSN: 1015-9584.
Anatomical Workspace Study of Endonasal Endoscopic Transsphenoidal Approach Journal Article
In: The Open Medicine, vol. 14, no. 1, pp. 537–544, 2019, ISSN: 2391-5463.
Challenges for Novice Developers in Rough Terrain Rescue Robots: A Survey on Motion Control Systems Journal Article
In: Journal of Control Science and Engineering, vol. 2019, pp. 1–12, 2019, ISSN: 1687-5257.

Motion Control Applications: Observer Based DC Motor Parameters Estimation for Novices Journal Article
In: International Journal of Power Electronics and Drive Systems (IJPEDS), vol. 10, no. 1, pp. 195–210, 2019, ISSN: 2088-8694.
A novel Design of N-Fiducial Phantom for Automatic Ultrasound Calibration Journal Article
In: Journal of Medical Physics, vol. 44, no. 3, pp. 191–200, 2019, ISSN: 0971-6203.
Pathway and Workspace Study of Endonasal Endoscopic Transsphenoidal (EET) Approach in 80 Cadavers Journal Article
In: International Journal of Surgery Open, vol. 16, pp. 22–28, 2019, ISSN: 2405-8572.

2018
Breast Biopsy Navigation System with an Assisted Needle Holder Tool and 2D Graphical User Interface Journal Article
In: European Journal of Radiology Open, vol. 5, pp. 93–101, 2018, ISSN: 2352-0477.
2015
Validation Study of a Wave Equation Model of Soft Tissue for a New Virtual Reality Laparoscopy Training System Journal Article
In: Biomedical Engineering Systems and Technologies, vol. 574, pp. 256–271, 2015, ISBN: 9783319277073.
2013
Advancing the State of Urban Search and Rescue Robotics Through the RoboCupRescue Robot League Competition Journal Article
In: Field and Service Robotics, vol. 92, pp. 127–142, 2013, ISBN: 9783642406867.
2012
A Robotic Monofilament Test for Diabetic Neuropathy: From Bench to Clinic Journal Article
In: Journal of Diabetes and Metabolism, vol. 03, no. 02, pp. 02–04, 2012, ISSN: 2155-6156.
Implementation on a New Tool Tip Calibration Method for Biomedical Applications Journal Article
In: Recent Advances in Computer Science and Information Engineering, vol. 125, pp. 385–392, 2012, ISBN: 9783642257780.
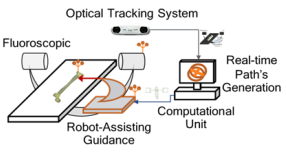
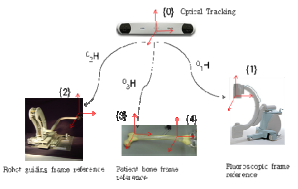
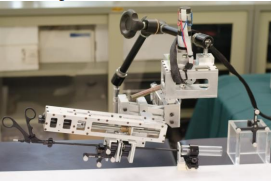
On the Design and Experiments of a Fluoro-Robotic Navigation System for Closed Intramedullary Nailing of Femur Journal Article
In: Recent Advances in Computer Science and Information Engineering, vol. 125, pp. 195–203, 2012, ISBN: 9783642257896.
2010
A Novel Robotic Monofilament Test for Diabetic Neuropathy Journal Article
In: Asian Journal of Surgery, vol. 33, no. 4, pp. 193–198, 2010, ISSN: 1015-9584.
2008
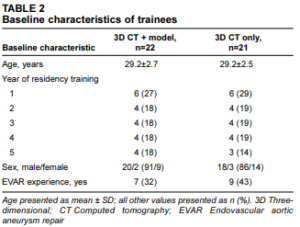
Three-Dimensional Aortic Aneurysm Model and Endovascular Repair: An Educational Tool for Surgical Trainees Journal Article
In: International Journal of Angiology, vol. 17, no. 03, pp. 129–133, 2008, ISSN: 1615-5939.
National Journals
2006
Binary Hyper-Redundant Robotic Manipulator Journal Article
In: Journal of Thai Robotics Society, vol. 4, no. 1, pp. 90-107, 2006.
Automatic Target Tracking and Firing System Journal Article
In: Journal of Thai Robotics Society, vol. 4, no. 1, pp. 47-58, 2006.
A Complete Study on 3-D Binary Hyper-Redundant Robotic Manipulator: Kinematics Analysis, Design and Constructions Journal Article
In: Journal of Thai Robotics Society, vol. 4, no. 1, pp. 90-107, 2006.
2005
Toward Self-Replicating Robots: An Overview on Self-Replication Machine Journal Article
In: Journal of Thai Robotics Society, vol. 3, no. 1, pp. 66-80, 2005.
International Proceedings
2024
Localization of the Upper Extremity Area on the Primary Motor Cortex with Transcranial Magnetic Stimulation Figure-of-Eight Coil: A Clinical Study Proceedings Article
In: 2024 17th International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), pp. 1–6, IEEE 2024.

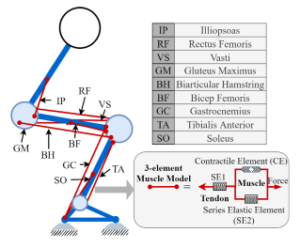
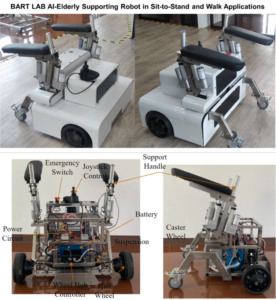
BART LAB AI Elderly Support Robot for Enhanced Biomechanical Assistance in Sit-to-Stand and Walking Activities Proceedings Article
In: 2024 17th International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), pp. 1–6, IEEE 2024.
Advancing Mobility in Stair Climbing with BART LAB's Intelligent Wheelchair: A Deep Learning Approach to Pose Estimation Proceedings Article
In: 2024 17th International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), pp. 1–6, IEEE 2024.

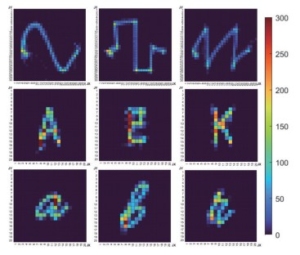
Hybrid Image-Based Motion Tracking and Adaptive Polynomial Kalman Filter for a Bio-Inspired Dual-Sheath Needle System Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1–7, IEEE 2024.
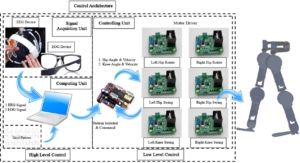
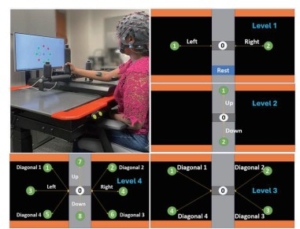
A Hybrid EEG-EMG Framework for Humanoid Control using Deep Learning Transformers Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 899–904, IEEE 2024.
Enhancing Post-Stroke Upper Limb Rehabilitation Through Haptic Feedback in Virtual Reality-Based Gaming Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 135–140, IEEE 2024.
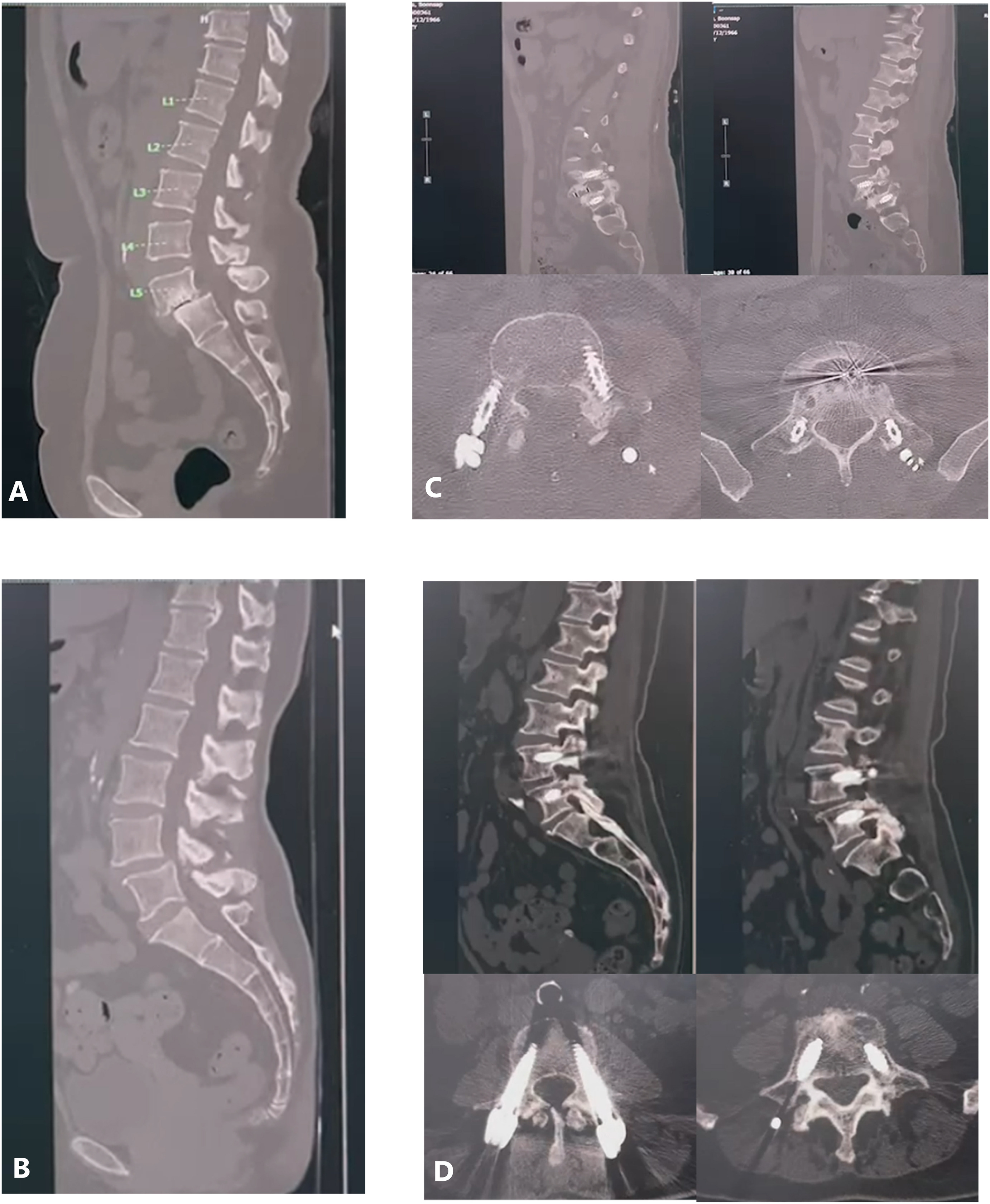
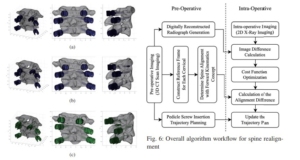
Intra-Operative Trajectory Realignment Algorithm for Minimizing Pedicle Screw Misplacement in Cervical Spinal Fusion Proceedings Article
In: 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1–6, IEEE 2024.
2023
Adaptive Polynomial Predictive Filter: Solving Inconsistent and Interrupted Sensor Data Challenges Proceedings Article
In: 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1-6, 2023.
Bio-Signal Activated FPGA-Based System for Robotic-Assisted Rehabilitation Proceedings Article
In: 2023 3rd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), pp. 195–199, IEEE 2023.
2022
Sensorless Based Gravity Torque Estimation and Friction Compensation for Surgical Robotic System Conference
IECON 2022 / ICELIE 2022 48th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Brussels, Belgium, 2022.
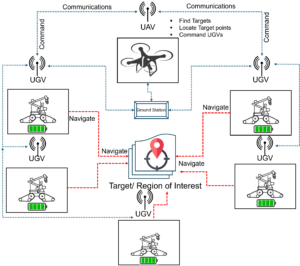
Energy Optimized Path Planning and Decision Making for Multiple Robots in Rescue Operations Conference
IECON 2022 / ICELIE 2022 48th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Brussels, Belgium, 2022.

Energy Storage and Reversible Mechanisms for Lower Limb Exoskeleton Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

Teleoperative Pedicle Screw Insertion Guiding System for Spinal Fixation Operations Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.
Saliva Sample-Based BARTLAB-MPH Robotic Testing System for COVID-19 Detection Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

Development of Teleoperative System for Ultrasonography Collaborative Robots Conference
The 18th Asian Conference on Computer Aided Surgery (ACCAS 2022), KKU Science Park, Khon Kaen, Thailand, 2022.

2022 15th IEEE International Conference on Human System Interaction, IEEE, Melbourne, Australia, 2022.

Energy Optimized Path Planning and Decision Making for Multiple Robots in Rescue Operations Conference
The International Society of Artificial Life and Robotics Conference: (AROB-ISBC-SWARM 2022), IEEE, Beppu, Japan, 2022.
Stereo Vision-based Object Detection and Depth Estimation from 3D Reconstructed Scene for an Autonomous Multi Robotic Rescue Mission Proceedings Article
In: The International Society of Artificial Life and Robotics Conference: (AROB-ISBC-SWARM 2022), pp. 1643-1647, Beppu, Japan, 2022.
2021
Live Displacement Estimation for Rough Terrain Mobile Robot: BART LAB Rescue Robot Proceedings Article
In: Proceedings of the IEEE International Siberian Conference on Control and Communications (SIBCON-2021), pp. 1-6, IEEE, Kazan, Russia, 2021.
2020
Constructing a Heterogeneous Model for Soft Tissue Deformation Using Two Dimensional Wave Equations Proceedings Article
In: Proceedings of the IEEE International Symposium on Medical Robotics (ISMR-2020), pp. 118-124, IEEE, Georgia Institute of Technology, USA, 2020.
2018
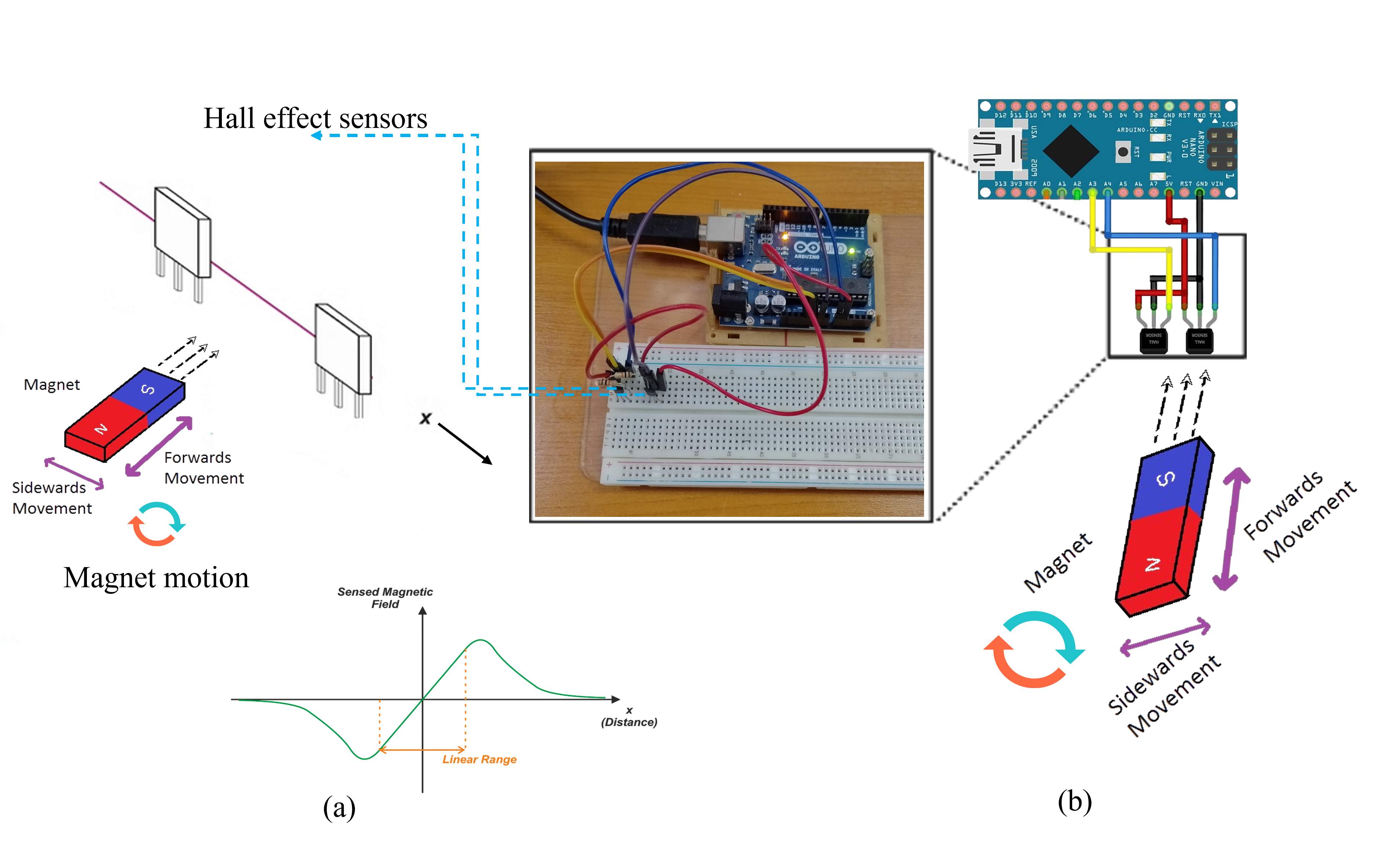
Hall Effect Sensing Workspace Estimation with Non-Permanent Magnetic Needle for Eye Anesthesia Training System via Robotic Experiments Proceedings Article
In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2018), pp. 4019-4024, IEEE, Brisbane, Australia, 2018.
2017
The Development of Active Magnetic Field Based Tracking System for Eye Anesthesia Training System Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.
Design and Development of Six-Position Feet Template for Peripheral Neuropathy Diabetes Testing Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.

A Study on Using A Liquid Crystal Polymer Pressure Sensor for Intracranial Pressure Monitoring Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.

Conceptual Design of the 2nd Iteration of BART LAB LL-EXO Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.
Virtual 3D Array for Bilaterally Controlled Surgical Robot Proceedings Article
In: Proceedings of the 26th Congress in International Society of Biomechanics (ISB 2017), Brisbane, Australia, 2017.

Endoscopic Transsphenoidal Surgical Robot with Optical Tracking Control Proceedings Article
In: Proceedings of the 10th Hamlyn Symposium on Medical Robotics, The Hamlyn Centre, Faculty of Engineering, Imperial College London, Imperial College, London, UK, 2017.
2016
Battery Management for Rescue Robot Operation Proceedings Article
In: Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO 2016), IEEE, Qingdao, China, 2016.
Development of Differential Suspension Wheeled System for Telepresence Robot in Rural Hospital Area Proceedings Article
In: 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1046-1051, IEEE, Qingdao, China, 2016.
A Study on Risk Assessment for Improving Reliability of Rescue Robots Proceedings Article
In: Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO 2016), pp. 667-672, IEEE, Qingdao, China, 2016.

Needle Tip Position Tracking for Eye Anesthesia Practical Simulator Based on Hall-Effect Array Sensor Proceedings Article
In: Proceeding of the 20th Annual Conference of the International Society for Computer Aided Surgery (CARS 2016), Heidelberg, Germany, 2016.

Enforced Acceleration Control for DC Actuated Rescue Robot Proceedings Article
In: 2016 XXII International Conference on Electrical Machines (ICEM), pp. 2640-2648, 2016.
2015
Wave Equation Model of Soft Tissue for a Virtual Reality Laparoscopy Training System - A Validation Study Proceedings Article
In: Proceedings of the 6th International Conference on Bioinformatics, Methods, and Algorithms (BIOINFORMATICS 2015), in conjunction with the 8th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2015), pp. 65–74, SCITEPRESS - Science and and Technology Publications, Lisbon, Portugal, 2015.

2014
Toward Biomimic Breast Deformable Model for Robotic Breast Biopsy Navigation Development Proceedings Article
In: Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 595-600, IEEE, Bali, Indonesia, 2014.

A Path Generation Algorithm for Biopsy Needle Insertion in a Robotic Breast Biopsy Navigation System Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 398-403, 2014.
Effective Vital Sign Sensing Algorithm and System for Autonomous Survivor Detection in Rough-Terrain Autonomous Rescue Robots Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 831-836, 2014.
Workspace Determination and Robot Design of a Prototyped Surgical Robotic System Based on a Cadaveric Study in Endonasal Transsphenoidal Surgery Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 241-246, 2014.
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 47-52, 2014.
A Study and Development on Robotic Drug Storaging and Dispensing System in Drug Logistics for a Mid-Sized Hospital Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 2116-2120, 2014.

On the Design of a Biopsy Needle-Holding Robot for a Novel Breast Biopsy Robotic Navigation System Proceedings Article
In: The 4th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent, pp. 480-484, 2014.
On the Design and Development of a Breast Biopsy Navigation System: Path Generation Algorithm and System with its GUI Evaluation Proceedings Article
In: IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), pp. 273-276, 2014.

2013
3D Navigation for Transsphenoidal Surgical Robotics System Based on CT — Images and Basic Geometric Approach Proceedings Article
In: 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2007-2012, 2013.
Development of Veress Needle Insertion Robotic System and its Experimental Study for Force Acquisition in Soft Tissue Proceedings Article
In: 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 645-650, 2013.
LCP MEMS Implantable Pressure Sensor for Intracranial Pressure Measurement Proceedings Article
In: The 7th IEEE International Conference on Nano/Molecular Medicine and Engineering, pp. 63-67, 2013.

2012
Design and Implementation of a New Motorized-Mechanical Exoskeleton Based on CGA Patternized Control Proceedings Article
In: 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1668-1673, 2012.
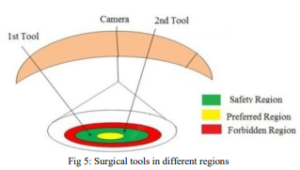
Euclidean Distance and Workspace Region Based Control Algorithm for Collision Avoidance in a Laparoscopic Surgical Robot: MU-LapaRobot Proceedings Article
In: 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2056-2061, 2012.
A Concept on Cooperative Tele-Surgical System Based on Image-Guiding and Robotic Technology Proceedings Article
In: 2012 Pan American Health Care Exchanges, pp. 41-45, 2012.
2011
The RoboCupRescue Robot League: Guiding Robots Towards Fieldable Capabilities Proceedings Article
In: Proceedings of the IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO) 2011, pp. 31–34, Half-Moon Bay, CA, USA, 2011.
Local Proceedings
2014
A Study for Design and Development of Control System for A New 1-DOF Haptic Device Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), pp. 39–45, Bangkok, Thailand, 2014.
Design and Analysis of a New 1-DOF Haptic Device Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), Bangkok, Thailand, pp. 46–51, Bangkok, Thailand, 2014.
Mathematical Model of Soft Tissue in Veress Needle Insertion for Haptics Implementation Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), pp. 52–58, 2014.

An Experiment on Communication Assessment for an Ongoing Tele-Surgical Robot Research in Thailand Proceedings Article
In: Proceedings of the 2014 TRS Conference on Robotics and Industrial Technology (CRIT 2014), pp. 91–95, 2014.
2012
Layered Workspace Based Control Algorithm for Collision Avoidance in a Laparoscopic Surgical Robot: µ-LapaRobot Proceedings Article
In: Proceedings of the 35th Electrical Engineering Conference (EECON-35), Pattaya Thailand, 2012.
In: Proceedings of the 35th Electrical Engineering Conference (EECON-35), Pattaya, Thailand, 2012.
Workspace Based Design Proposal for Surgical Robot with Endoscopic Endonasal Transsphenoidal Approach Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 79–81, Nakorn Phatom, Thailand, 2012.
Surgical Robotics System MU-LapaRobot Proceedings Article
In: Proceedings of 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), Nakorn Phatom, Thailand, 2012.
Motion Analysis of BART LAB LL-EXO1 Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 11–14, 2012.

Introduction to A Walking – Assisted Robot, BART LAB LL-EXO1 Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 7–10, Nakorn Phatom, Thailand, 2012.
Haptic Simulation Training System for Abdominal Wall Surgery Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 77–78, Nakorn Phatom, Thailand, 2012.
On the Design of a Passive Robotic Breast Biopsy Needle Holder and Its 3D Graphical Human-Machine Interaction Based on 3D Slicer Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), Nakorn Phatom, pp. 82–85, Nakorn Phatom, Thailand, 2012.
Multi Sensor Array and Graphical User Interface Integrated with Comfortable Socks (Magic Socks) Proceedings Article
In: Proceedings of the 2012 TRS Conference on Robotics and Industrial Technology (CRIT 2012), pp. 140–143, Nakorn Phatom, Thailand, 2012.

2011
MU-LapaRobot: A Novel 4-DOF Wire-Driven Laparoscopic Surgical Robot System for Cooperative and Tele-Operative Procedures Proceedings Article
In: Proceedings of the 34th Electrical Engineering Conference (EECON-34), pp. 1141–1144, Pattaya, Thailand, 2011.

Workspace Analysis for a New Design Laparoscopic Robotic Manipulator", MU-LapaRobot1" Proceedings Article
In: Proceedings of the 20th National Grad Research Conference, pp. 128, Thailand, 2011.
2007
SET Robot Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.
Medical Tool Positioning System Using Ultrasonic Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.

Motion Control of Intelligence Vehicle Using Camera and Other Systems Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.

Kinematic Analysis for Rotary Protein Manipulation Proceedings Article
In: Proceedings of the 2007 TRS Conference on Robotics and Industrial Technology (CRIT 2007), Nakorn Phatom, Thailand, 2007.
2005
M.U. Binary Hyper-Redundant Robotic Manipulator Proceedings Article
In: Proceedings of the 2005 TRS Conference on Robotics and Industrial Technology (CRIT 2005), pp. 33–41, Nonthaburi, Thailand, 2005.
2004
Toward Self-Replicating Robots: An Overview on Self-Replicating Machine Proceedings Article
In: Proceedings of the 2004 TRS Conference on Robotics and Industrial Technology (CRIT 2004), Nakorn Phatom, Thailand, 2004.
Dissertations and Thesis
2022
Haptic Virtual Reality Based Surgical Training System: Hardware, Software and Testing PhD Thesis
2022, (Supervised by Jackrit Suthakorn, Ph.D.).
Design and Development of Mobility Assistance Robot for Elderly Masters Thesis
2022, (Supervised by Jackrit Suthakorn, Ph.D.).
2021
Robot Assisted Transanal Minimally Invasive Surgery PhD Thesis
2021, (Supervised by Jackrit Suthakorn, Ph.D.).
Ultrasound Triggered Affinity-Drug Release from β-Cyclodextrin Hydrogels for Infection Control Masters Thesis
2021, (Supervised by Jackrit Suthakorn, Ph.D.).
2020
Robot-Assisted Percutaneous Pedicle Screw Insertion PhD Thesis
2020, (Supervised by Jackrit Suthakorn, Ph.D.).
A Study of Standards for the Design and Development of a Fully Standardized Hospital Logistic Mobile Robot for Delivering Drugs and Medical Supplies Masters Thesis
2020, (Supervised by Jackrit Suthakorn, Ph.D.).
2019
LCP Mems Implantable Pressure Sensor for Intracranial Pressure Measurement in Traumatic Brain Injury PhD Thesis
2019, (Supervised by Jackrit Suthakorn, Ph.D.).
Compliance Constraint Control Based Minimally Invasive Surgery (MIS): Primary Trocar Insertion for Robot-Assisted Laparoscopic Platform PhD Thesis
2019, (Supervised by Jackrit Suthakorn, Ph.D.).
Robot Assisted Endonasal Endoscopic Transsphenoidal Surgery: The Development of Robotic Prototype PhD Thesis
2019, (Supervised by Jackrit Suthakorn, Ph.D.).
2018
Computer-Integrated Breast Biopsy Using Mammogram and Ultrasound Imaging with Breast Mathematical Model PhD Thesis
2018, (Supervised by Jackrit Suthakorn, Ph.D.).
The Design and Development of Prototyped Surgical Navigation Robotic System for EET Surgery Based Cadaveric Study Masters Thesis
2018, (Supervised by Jackrit Suthakorn, Ph.D.).
The Development of Telepresence Robot for Medical Application Based Full Study on Practical Scenario in Clinical Study Masters Thesis
2018, (Supervised by Jackrit Suthakorn, Ph.D.).
2016
The Development of a Virtual Simulator for a Novel Design Surgical Tool in Endoscopic Endonasal Transsphenoidal Surgery (EETS) Bachelor Thesis
2016, (Supervised by Jackrit Suthakorn, Ph.D.).
A Mathematical Model of Soft Tissue Using Wave Equation for Realistic Visualization in a New Laparoscopic Virtual Reality Training System Masters Thesis
2016, (Supervised by Jackrit Suthakorn, Ph.D.).
An Image-Guided Breast Biopsy Robotic Navigation System Based on Real-Time Ultrasound Image Masters Thesis
2016, (Supervised by Jackrit Suthakorn, Ph.D.).
Fusion Sensory Schemes for Real-Time Survival Searching on Extreme-Terrain Rescue Robot: A further Study from a Real Experience Masters Thesis
2016, (Supervised by Jackrit Suthakorn, Ph.D.).
2015
Design and Control of the MU-Active Lower Limb Exoskeleton for Spinal Cord Injury Masters Thesis
2015, (Supervised by Jackrit Suthakorn, Ph.D.).
A Study and Development on Robotic Drug Dispensing System in Drug Logistics for A Mid-Sized Hospital Masters Thesis
2015, (Supervised by Jackrit Suthakorn, Ph.D.).
Doctosight, the Mobile Tele-Diagnosis Robot Bachelor Thesis
2015, (Supervised by Jackrit Suthakorn, Ph.D.).
Brain-Controlled Lower Limb Exoskeleton for Paraplegic Bachelor Thesis
2015, (Supervised by Jackrit Suthakorn, Ph.D.).
Real Phantom and Haptic VR Approaches for Intelligent Needle Insertion Training System for Eye Anesthesia Bachelor Thesis
2015, (Supervised by Jackrit Suthakorn, Ph.D.).
2014
Endoscotic Transsphenoidol Surgical Robot with Optical Tracking Control Masters Thesis
2014, (Supervised by Jackrit Suthakorn, Ph.D.).
A Study on Multi-Modality Communication for Robotic Tele-Surgery Masters Thesis
2014, (Supervised by Jackrit Suthakorn, Ph.D.).
Design and Development of A Surgical Assisted Robot in Endonasal Transsphenoidal Surgery Bachelor Thesis
2014, ((Supervised by Jackrit Suthakorn, Ph.D.).
Intelligent Needle Insertion Training System for Eye Anesthesia (INITSEA) Bachelor Thesis
2014, (Supervised by Jackrit Suthakorn, Ph.D.).
Epileptic Foci Localization System by Ictal/Interictal SPECT Reconstruction Integrated with Telepresence Robotic System Bachelor Thesis
2014, (Supervised by Jackrit Suthakorn, Ph.D.).
Development of Intelligent System Control for MU-Laparobot with a Preliminary Study on Surgeon-Robot Interaction Bachelor Thesis
2014, (Supervised by Jackrit Suthakorn, Ph.D.).
2013
Control and Human Machine Interface on A Lapro-Surgical Robotic System (MU-LapaRobot) Masters Thesis
2013, (Supervised by Jackrit Suthakorn, Ph.D.).
Development of the MicroVibrated Robot for Orthopedic Surgery in Drilling Application Masters Thesis
2013, (Supervised by Jackrit Suthakorn, Ph.D.).
2012
Robot-Assisted Intramedullary Nail Insertion Masters Thesis
2012, (Supervised by Jackrit Suthakorn, Ph.D.).
System Integration of a Robot-Assisting Surgical Guidance System for Distal Locking Process in Closed Intramedullary Nailing of Femur Masters Thesis
2012, (Supervised by Jackrit Suthakorn, Ph.D.).
A Study of Rotary-Brake Design for Utilizing in Motorized Upper Limb Prosthesis Masters Thesis
2012, (Supervised by Jackrit Suthakorn, Ph.D. and Jonathon W. Sensinger, Ph.D.).
Design and Implementation of a New Motorized-Mechanical Exoskleton Based on CGA Patternized Control Bachelor Thesis
2012, (Supervised by Jackrit Suthakorn, Ph.D.).
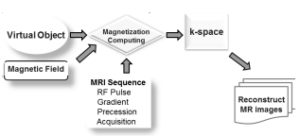
Simulation and Image Reconstruction for Magnetic Resonance Imaging Bachelor Thesis
2012, (Supervised by Jackrit Suthakorn, Ph.D.).
2011
Kinematic Analysis and Algorithm for Computer-Integrated Total Knee Replacement Surgery Masters Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
Design and Development of a Surgical Robot for Total Knee Replacement Application Masters Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
Novel Calibration Algorithms for Percutaneous Ultrasound-Guided Breast Biopsy Masters Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
Development of an Image-Guided Endoscopic Robot for Computer-Assisted Surgery Masters Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
Design and Development of a Novel Laparoscopic Robotic System (MU-LAPAROBOT) Masters Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
Non-Invasive Colonoscope Tracking Using Electromagnetic Field Technique Bachelor Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
Haptic Interaction for Traning in Basic Abdominal Wall Surgery Bachelor Thesis
2011, (Supervised by Jackrit Suthakorn, Ph.D.).
2009
Development of Algorithms in Surgical Guidance System Using Image Processing Techniques Masters Thesis
2009, (Supervised by Jackrit Suthakorn, Ph.D.).
Computer-Aided System for F1-ATPASE Rotating Manipulation Masters Thesis
2009, (Supervised by Jackrit Suthakorn, Ph.D.).
2008
Position and Orientation Recovery of Intramedullary Nail Distal Holes Masters Thesis
2008, (Supervised by Jackrit Suthakorn, Ph.D.).
2007
Self-Replicating Robot Bachelor Thesis
2007, (Supervised by Jackrit Suthakorn, Ph.D.).
SET Robot (Special Euclidean Tracking Robot) Bachelor Thesis
2007, (Supervised by Jackrit Suthakorn, Ph.D.).
2006
A Kinematic Analysis for Hyper – Redundant Robotic Manipulator. Bachelor Thesis
2006, (Supervised by Jackrit Suthakorn, Ph.D.).
2005
Binary Hyper – Redundant Robotic Manipulator Bachelor Thesis
2005, (Supervised by Jackrit Suthakorn, Ph.D.).
Mechanical Design of a self – Replicating Robot Bachelor Thesis
2005, (Supervised by Jackrit Suthakorn, Ph.D.).
2003
Paradigms for Service Robotics PhD Thesis
2003, (Supervised by Gregory S. Chirikjian, Ph.D.).